
sales06@switek.biz

+86 186 5927 5869

Shopping

Subscrib to Us
sales06@switek.biz
+86 186 5927 5869
Shopping
Subscrib to Us
Keywords:Panasonic A6 Servo Installation Instruction, Panasonic A6 Driver, Panasonic A6 Series Servo Motor Manual
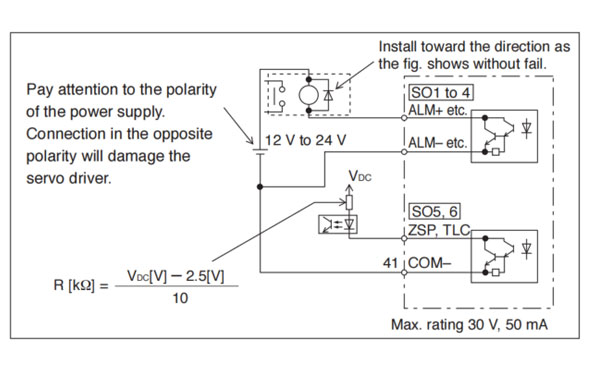
Here in this chapter is the wiring instruction of input/out connecting to the contacts of switches and relays, or open collector output transistors.
For the recommended primary current value, refer to the data sheet of the equipment and photocoupler to be used.
• For function, refer to P.3-48 to P.3-52. P.3-55
<Resolution> (1)Speed monitor output (SP)
With a setup of 6 V/3000 r/min, the resolution converted to speed is 4 r/min/8 mV.
(2) Torque monitor output (IM)
With a relation of 2 V/rated torque (100%), the resolution converted to torque is 0.4%/8 mV.



