
sales06@switek.biz

+86 186 5927 5869

Abonnieren Sie uns
sales06@switek.biz
+86 186 5927 5869
Abonnieren Sie uns
Schlüsselwörter:IML-Roboter; Betrieb eines IML-Roboters; In-Mold-Labeling-Robotik
Die Bedieneinheit des IML-Roboters bietet eine benutzerfreundliche Mensch-Maschine-Schnittstelle (HMI) für die Bediener des IML-Roboters zum Starten, Programmieren oder Diagnostizieren des Systems. In diesem Kapitel helfen wir Ihnen, die Steuereinheit des IML-Roboters und die Funktion der einzelnen Komponenten der Bedieneinheit besser zu verstehen.
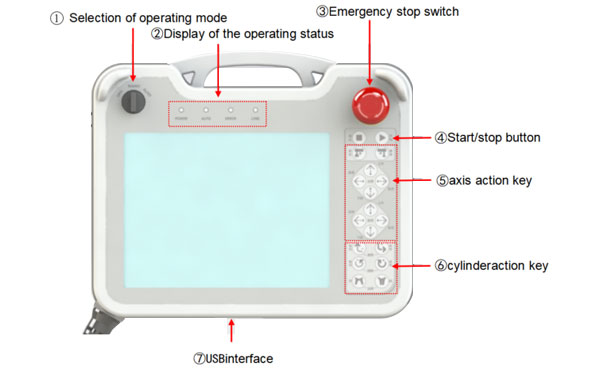
Vorderseite:
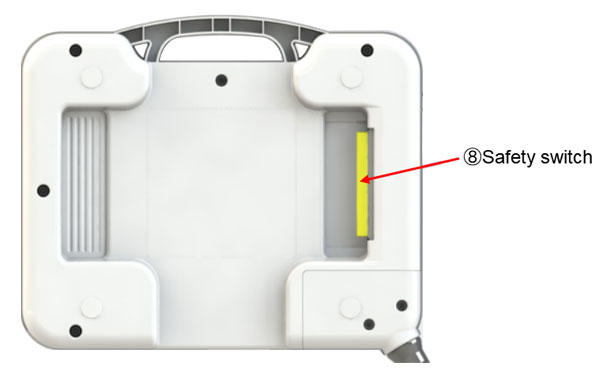
Rückseite:
| NEIN. | Name | Funktionen |
|---|---|---|
| 1 | Auswahl des Betriebsmodus | Umschalten zwischen Ursprungs-, manuellem und automatischem Modus |
| 2 | Anzeige des Betriebszustands |
|
| 3 | Not aus | Not-Aus des Take-out-Roboters. Um den Not-Aus zu lösen, drehen Sie den Schlüssel im Uhrzeigersinn. |
| 4 | Start/Stopp-Taste | Start-/Pause-Funktion des Automatikbetriebs. |
| 5 | Achsen-Aktionstaste | Mit dem Sicherheitsschalter können die fünf Achsen in positiver und negativer Richtung bewegt werden. |
| 6 | Zylinderbetätigungsschlüssel | Mit dem Sicherheitsschalter wird die Zylinderbewegung gesteuert. |
| 7 | USB-Schnittstelle | Kommunikationsschnittstelle zum Hoch- und Herunterladen von Daten auf dem Teach-Pendant. |
| 8 | Sicherheitsschalter | Im manuellen Betrieb können durch Drücken dieser Taste die Aktionen aller manuellen Aktionstasten ausgeführt werden. |
TSM-1000P:
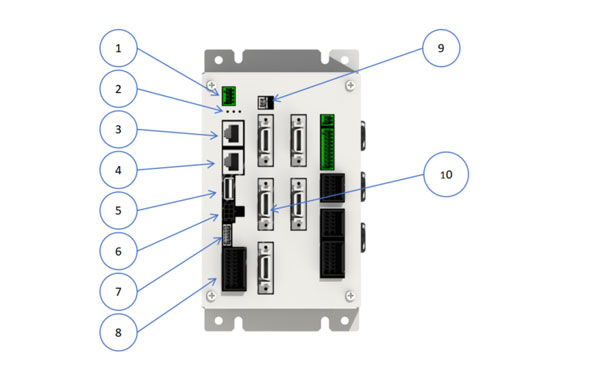
Detaillierte Verdrahtungsbeschreibung:
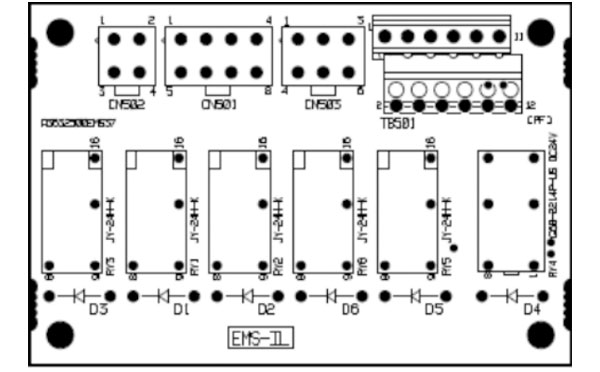
CN501:
| STIFT | Etikett | Name | Notiz |
|---|---|---|---|
| 1 | X00 | M-Arm-Up-Signal | Verdrahtung zu TIO-A |
| 2 | X07 | S-Arm-Up-Signal | Verdrahtung zu TIO-A (kurz bei Tri-Achsen) |
| 3 | X18 | Platzierungszone | Verdrahtung zu TIO-A |
| 4 | 24G | 24G | Keine Verkabelung |
| 5 | 24G | 24G | |
| 6 | 24G | 24G | |
| 7 | 24G | 24G | |
| 8 | 24G | 24G |
CN502:
| STIFT | Etikett | Name | Notiz |
|---|---|---|---|
| 1 | RY2 | Relaisausgang (nicht verwendet) | nicht verwendet |
| 2 | 24V | 24V | Schließen Sie die Stromversorgung L+ an. |
| 3 | 24G | 24G | |
| 4 | 24G | 24G | Stromanschluss L- |
CN503:
| STIFT | Etikett | Name | Notiz |
|---|---|---|---|
| 1 | MP_ON_1 | Servo an | Schließen Sie den I/O-Port am Controller (MOT) an. |
| 2 | EMS_1 | EMS-Signalausgang | |
| 3 | EMS_SW_1 | EMS-Signaleingang | |
| 4 | MP_ON_2 | Schütz-Servo an | |
| 5 | EMS_2 | EMS-Signalausgang | |
| 6 | EMS_SW_2 | EMS-Signaleingang |
TB501:
| STIFT | Etikett | Name | Notiz |
|---|---|---|---|
| 1 | EMS OUT1 | Take-away-Automat EMS-Ausgang 1 | Schließen Sie die Kabelleitung 23 an (die Leitung, die mit der Spritzgießmaschine verbunden ist). |
| 2 | EMS OUT2 | Take-away-Automat EMS-Ausgang 2 | Anschlusskabel 24 |
| 3 | Y35 | MLD-Schließen aktivieren | Verbinden Sie PIN 2 in CN302 am PIO |
| 4 | Y35 | MLD-Schließen aktivieren | Verbinden Sie PIN6 in CN302 am PIO |
| 5 | Y35 | MLD-Schließen aktivieren | Anschlusskabel 10 |
| 6 | Y35 | MLD-Schließen aktivieren | Anschlusskabel 11 |
| 7 | EMSIN_1(24V) | Äußerer EMS-Signaleingang 1 | Bitte verbinden Sie PIN7 und PIN8, wenn Sie das externe Not-Aus-Signal nicht verwenden. |
| 8 | EMSIN1_1 | Äußerer EMS-Signaleingang 1 | |
| 9 | EMSIN1_2 | Äußerer EMS-Signaleingang 2 | Bitte verbinden Sie PIN9 und PIN10, wenn Sie das externe Not-Aus-Signal nicht verwenden. |
| 10 | EMSIN1_2 | Äußerer EMS-Signaleingang 2 | |
| 11 | EMSIN1_3 | Äußerer EMS-Signaleingang 3 | Bitte verbinden Sie PIN11 und PIN12, wenn Sie das externe Not-Aus-Signal nicht verwenden. |
| 12 | EMSIN1_3 (24G) | Äußerer EMS-Signaleingang 3 |
Kontaktieren Sie SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







