
sales06@switek.biz

+86 186 5927 5869

Abonnieren Sie uns
sales06@switek.biz
+86 186 5927 5869
Abonnieren Sie uns
Schlüsselwörter:IML-Roboter; IML-Roboterbetrieb; In-Mold-Labeling-Robotik
Die Positionierung des IML-Roboters relativ zur Spritzgießmaschine und zum Werkzeug ist entscheidend für die Teilequalität. Hier zeigen wir Ihnen Schritt für Schritt, wie Sie einen SWITEK IML-Roboter installieren und dessen Positionierung optimal anpassen, um eine effiziente Produktion hochwertiger IML-Behälter zu gewährleisten.
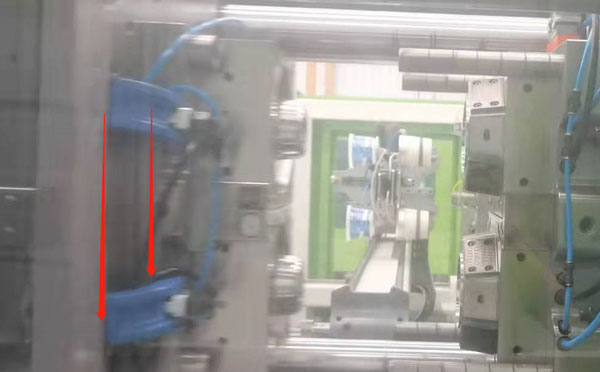
Schritt 1: Die Anordnung der IML-Systeminstallation
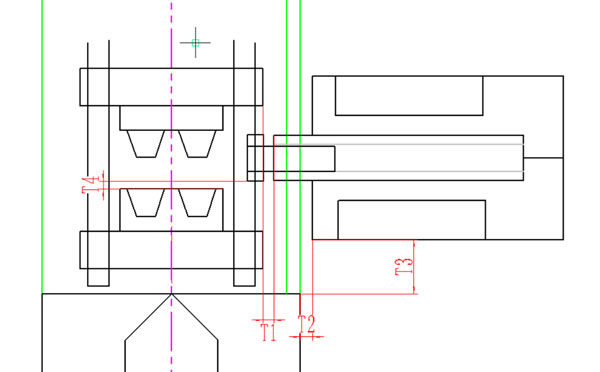
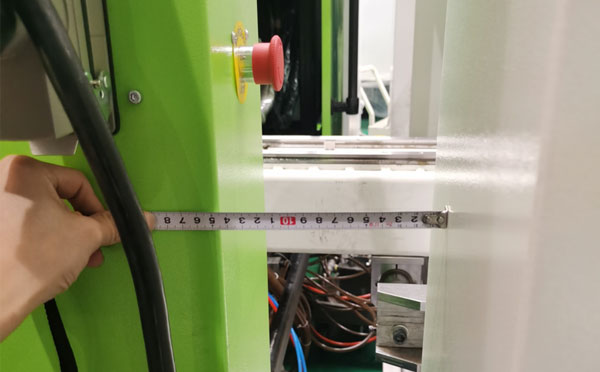
Die seitlich einfahrenden IML-Roboter werden auf der bedienerabgewandten Seite der Spritzgießmaschine installiert. Die Sicherheitstür auf der bedienerabgewandten Seite der Spritzgießmaschine ist permanent geöffnet, damit der IML-Roboter Teile entnehmen und Etiketten einlegen kann, ohne jedoch das Öffnen und Schließen der Form zu beeinträchtigen. Die Parameter T1, T2, T3 und T4 geben die allgemeinen Richtlinien für den Abstand zwischen dem IML-Roboter, der Spritzgießmaschine und der Form in einer IML-Systeminstallation an. Bitte stellen Sie sicher, dass T1 > 6 cm und T4 > 2 cm.
T2 ist der Abstand zwischen dem IML-Roboter und der Spritzgießmaschine. Wenn der Abstand zwischen dem IML-Roboter und der Spritzgießmaschine nicht genau bestimmt werden kann, muss sichergestellt werden, dass T1 > 6 cm ist, um Produktionsstörungen zu vermeiden.
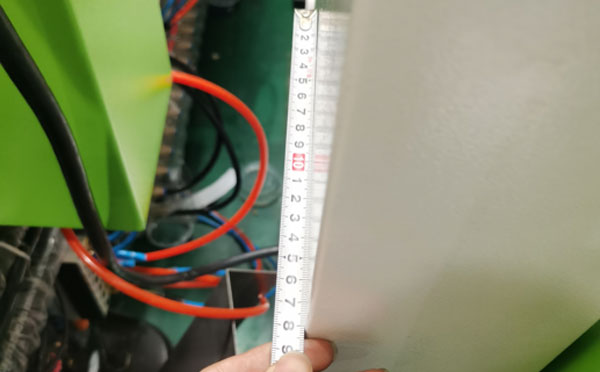
Der Abstand T3 bestimmt die Position des IML-Roboterarms, um eine Kollision der Vorrichtung mit der Form bei geringfügigen Abweichungen zu verhindern. Falls Sie sich bezüglich T3 unsicher sind, stellen Sie sicher, dass T4 nach der Installation der Vorrichtung größer als 2 cm ist.
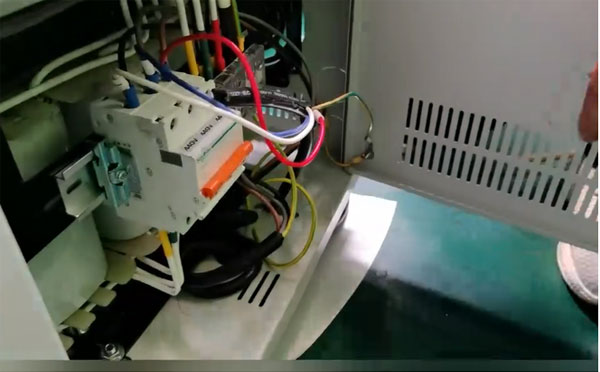
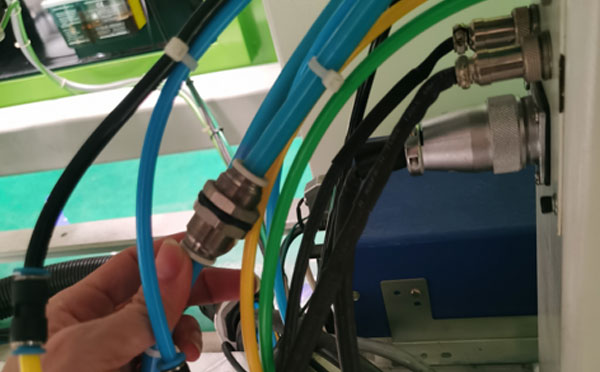
Schritt 2: Pipeline-Verbindung
Schließen Sie das Netzteil, den Controller und die Druckluftversorgung an und starten Sie den IML-Roboter.

Nach dem Einschalten die Befestigung des IML-Roboters prüfen und freigeben, die Bewegung jeder Achse und die Funktion der Befestigung manuell testen.

Sie können mit dem nächsten Schritt des IML-Roboterstarts fortfahren, nachdem Sie sichergestellt haben, dass alle Luftleitungen ordnungsgemäß angeschlossen sind und die Bewegungen aller Achsen und Vorrichtungen einwandfrei funktionieren.

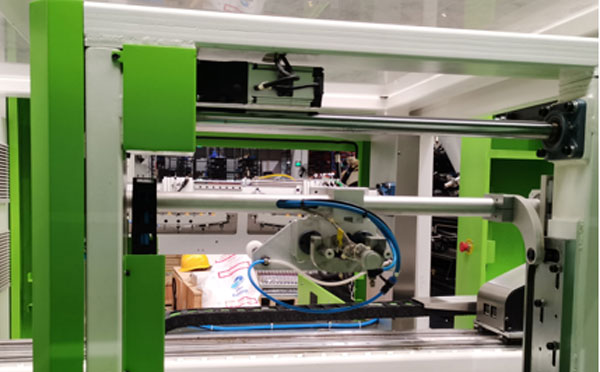
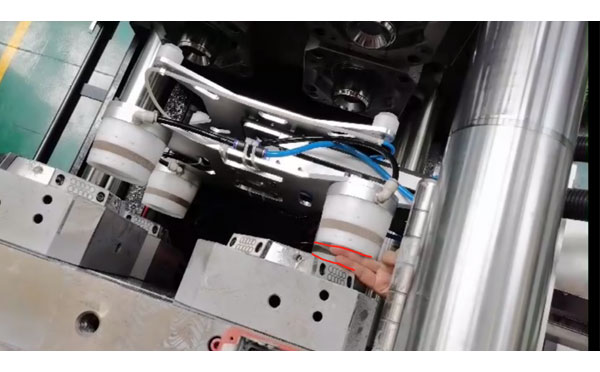
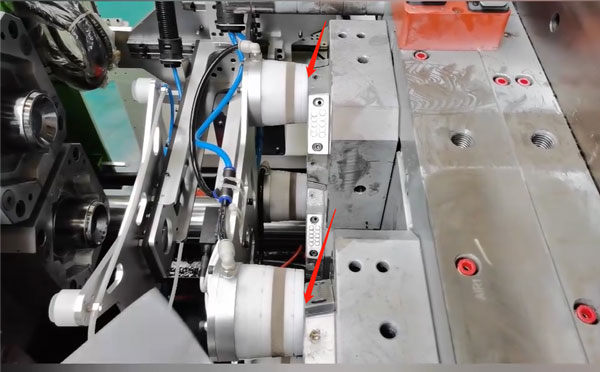
Schritt 3: IML-Roboterstart und Nivellierung
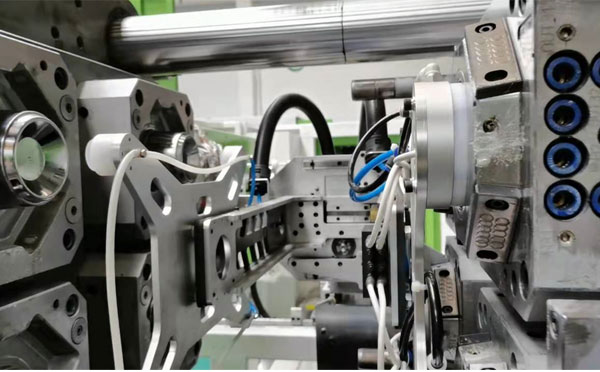
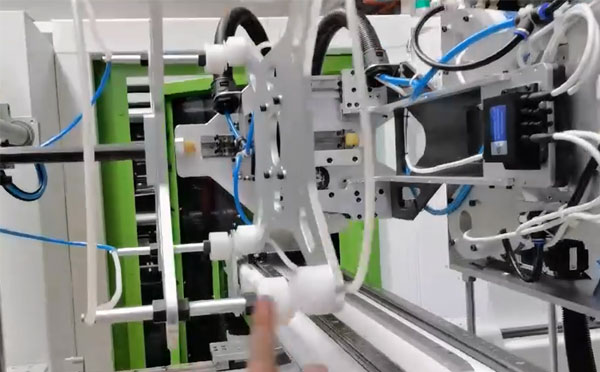
Der Spalt zwischen dem Dorn und dem Formhohlraum ist entscheidend dafür, ob der Roboter das Etikett perfekt platzieren kann, was wiederum die Qualität des hergestellten IML-Behälters bestimmt.
In einem optimal installierten IML-System befinden sich der IML-Roboter-Dummy und der Formhohlraum auf derselben Mittelachse. In diesem Fall wird sichergestellt, dass der Dummy beim Ein- und Ausfahren in den Formhohlraum keinen Widerstand erfährt und die Etiketten kollisionsfrei und gleichmäßig positioniert platziert werden.
Die Position des Dorns und seine Ausrichtung zur Formkavität können mithilfe der vier Stützfüße des IML-Roboters und der Kappen der Spritzgießmaschine eingestellt werden.
Die Vorgehensweise zum Einstellen der Nivellierung des IML-Systems ist wie folgt:
Nivellieren Sie die Spritzgießmaschine. Verwenden Sie die Kante der beweglichen Aufspannplatte als Bezugspunkt und stellen Sie sicher, dass beide Seiten der Form parallel zur Kante der festen Aufspannplatte verlaufen.
Justieren Sie die vertikale Position des IML-Roboters relativ zur Spritzgießmaschine. Wir können einen Kran oder einen Gabelstapler verwenden, um das Ende des IML-Roboters zu bewegen und den Spalt zwischen dem Dummy und dem Formhohlraum anzupassen. Dabei ist sicherzustellen, dass die Abweichung auf beiden Seiten <1 mm beträgt.
Durch Anheben oder Absenken der Säule auf einer Seite des IML-Roboters kann die obere und untere Abweichung des Dorns korrigiert werden.


Wenn bei abgekoppeltem Servo die Dorne manuell in die Formhohlräume gedrückt werden können, bedeutet dies, dass die Ausrichtung des IML-Roboters korrekt ist.

Lassen Sie eine Probe mit derselben Form spritzen, schneiden Sie Ober- und Unterseite ab und setzen Sie den Ring in den Formhohlraum ein. Drücken Sie die Dorne in den Ring und befestigen Sie den Dorn anschließend an der Vorrichtung.
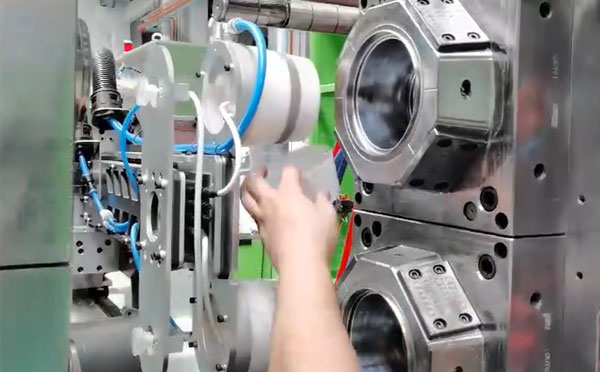
Schritt 4: Austausch des Magazins und Einstellung der Wasserwaage.
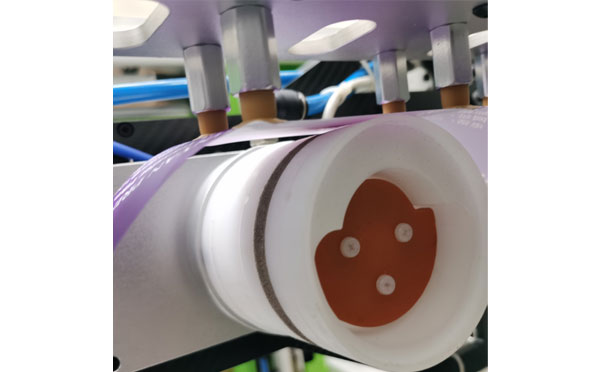

Beim Starten des IML-Roboters kann der Etikettenaufnahmezylinder ein Etikett aus dem Magazin entnehmen und auf den Dorn wickeln. Dabei wird ein Abstand von 1–2 mm zwischen Etikettenrand und Dornunterseite eingehalten, um sicherzustellen, dass die Etiketten perfekt in die Formhohlräume eingesetzt werden.
Passen Sie die Position des Saugnapfs so an, dass die Produkte angesaugt werden können.
Nach der vollständigen Nivellierung ist der IML-Roboter nun bereit für die Programmierung zur Herstellung von IML-Behältern. Bitte folgen Sie der Teaching Anleitung des IML-Roboters, um die Position für die Aufnahme und Platzierung des Etiketts anzupassen. Sollten Sie noch Fragen zur Installation und Justierung des SWITEK IML-Roboters haben, kontaktieren Sie bitte unseren Techniker. Unser technischer Online-Support steht Ihnen jederzeit zur Verfügung.
Kontaktieren Sie SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







