
sales06@switek.biz

+86 186 5927 5869

Abonnieren Sie uns
sales06@switek.biz
+86 186 5927 5869
Abonnieren Sie uns
Wenn Sie einen Roboterarm für Ihr Spritzgießprojekt bestellen, montieren wir diesen so, dass die Teile je nach Projekt entweder von der Bedienerseite oder von der Nicht-Bedienerseite abgeworfen werden. Manchmal ist es jedoch erforderlich, die Teileabwurfrichtung auf die andere Seite der Spritzgießmaschine zu verlegen. In diesem Fall muss die Montage des Roboterarms umgekehrt werden. In diesem Kapitel verwenden wir einen 3-Achs-Servo-Spritzgießroboter mit Panasonic-Servomotor und -Treiber als Beispiel, um die umgekehrte Montage des Roboterarms zu demonstrieren.
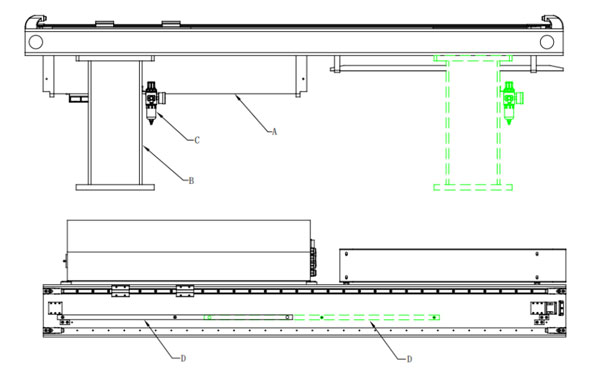
Basis Rückseite
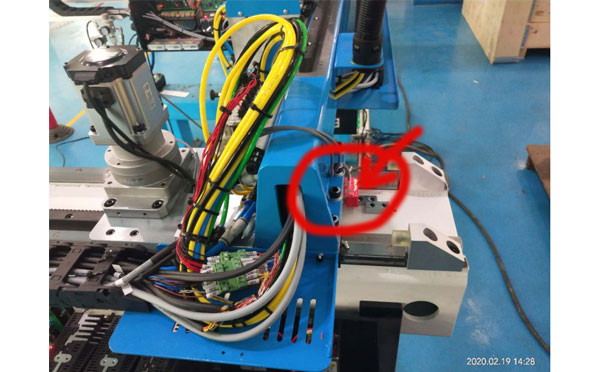
Sensor Rückwärtsgang 1
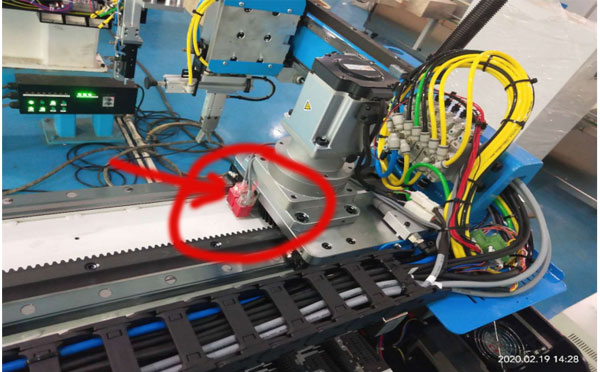
Sensor Rückwärtsgang 2
Beschreibung

Panasonic A6 Parametereinstellungen
Der Modifizierungsprozess:
Drücken Sie die Taste „S“ → drücken Sie dann die Taste „M“ (einmal), suchen Sie nach Pr0.00 → drücken Sie die Taste „S“ (einmal), wenn der angezeigte Parameter „1“ ist, ändern Sie ihn in „0“; wenn er „0“ ist, ändern Sie ihn in „1“ (verwenden Sie die Auf-/Ab-Tasten, um die Parameter zu ändern). Nachdem alle Einstellungen vorgenommen wurden, drücken Sie die Taste „S“ 2 Sekunden lang → drücken Sie die Taste „M“ (einmal) → drücken Sie die Taste „Aufwärts“ (halten Sie sie 7 Sekunden lang gedrückt, bis auf dem Bildschirm „-----“ angezeigt wird), um die Einstellungen zu speichern.
Wiederholen Sie den obigen Vorgang, um die Parameter von Pr0.12 einzustellen. Schalten Sie den Roboter anschließend aus und starten Sie ihn neu, sobald alle Parametereinstellungen abgeschlossen sind. Der Roboter wird dann mit den neuen Einstellungen initialisiert.
WARNUNG: Bitte führen Sie jegliche Parameteränderungen zu Ihrer Sicherheit nur nach Anweisung unseres Online-Serviceteams durch. Unser Servicetechniker begleitet Sie Schritt für Schritt durch den gesamten Prozess.
Kontaktieren Sie SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







