Abstrakt
Die Roboterarme für Spritzgießmaschinen werden oben an der Spritzgießmaschine montiert. Der Monteur muss während des gesamten Installationsvorgangs die SICHERHEITSHINWEISE beachten. In diesem Kapitel finden Sie eine detaillierte Anleitung zur sicheren Befestigung des Roboterarms an der Spritzgießmaschine.
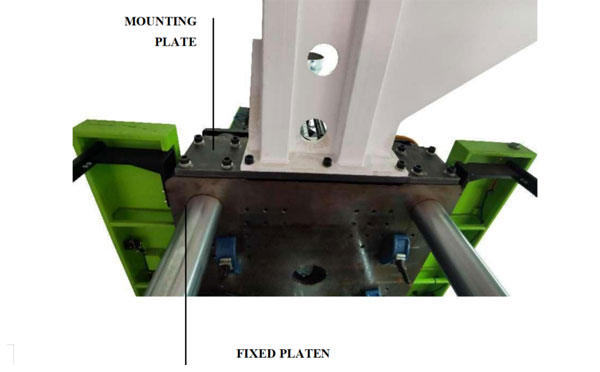
3.1 Überprüfen Sie die Lochgröße der Montageplatte
Überprüfen Sie zunächst, ob die Robotergrundplatte oder Transferplatte zur Montageplatte der Spritzgussmaschine passt.
3.2 Verwenden Sie einen Kran, um den Roboter aufzunehmen
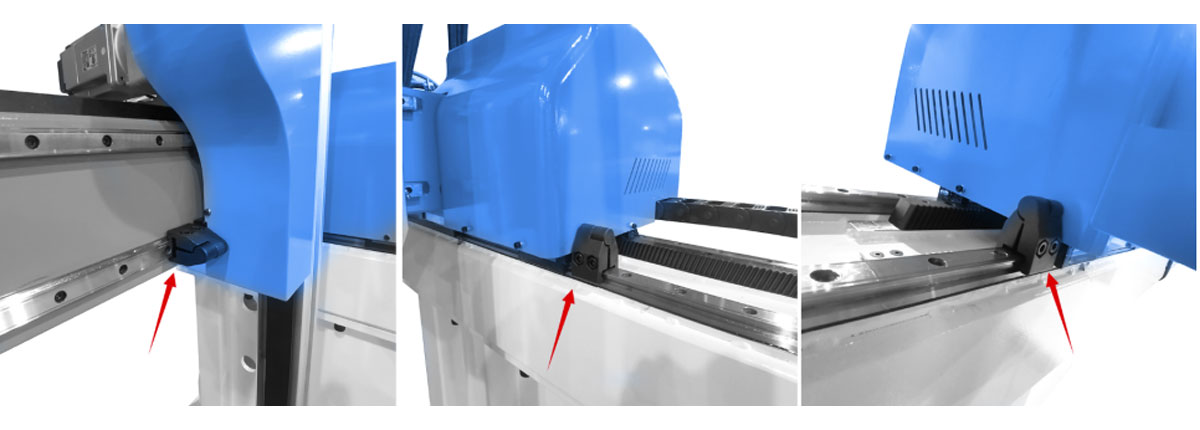
- Bewegen Sie die X-Achse manuell, platzieren Sie die X-Achse am Ende der Z-Achse und lassen Sie sie mit einem Klemmblock arretieren.
- Bewegen Sie die X-Achse manuell etwa 200 mm bis zum Ende der Z-Achse und lassen Sie sie mit einem Klemmblock blockieren.
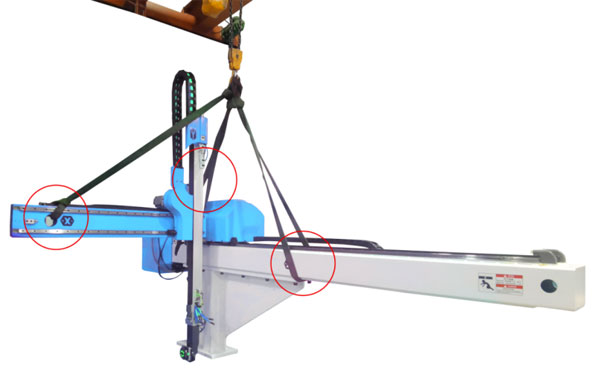
- Führen Sie ein langes Spezialseil für den Kran durch die Ladeöffnungen an beiden Enden des Maschinenträgers. Ein weiteres Spezialseil dient zur Kranverriegelung der X-Achse (um ein Kippen der Maschine durch ungleichmäßige Kräfte zu verhindern). Ermitteln Sie den Gleichgewichtspunkt der Maschine und heben Sie sie dann wie folgt an:
3.3 Mit Spritzgussmaschine verbinden
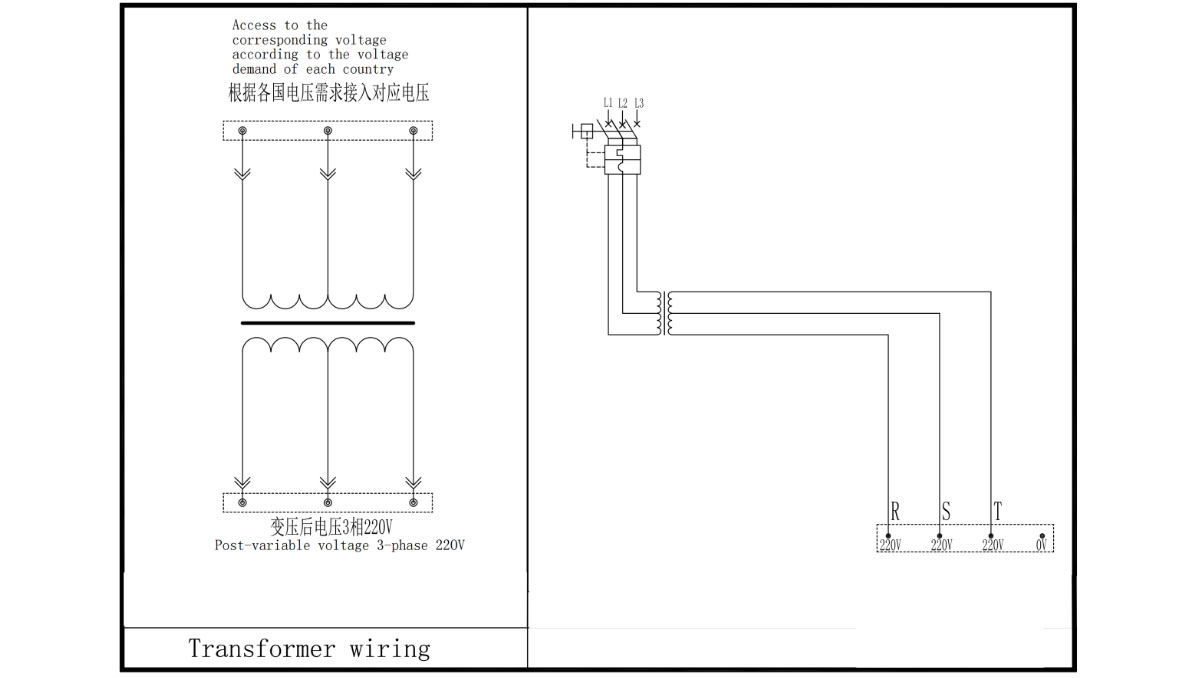
Anschluss der Stromversorgung -- Stromverkabelung über einen Transformator
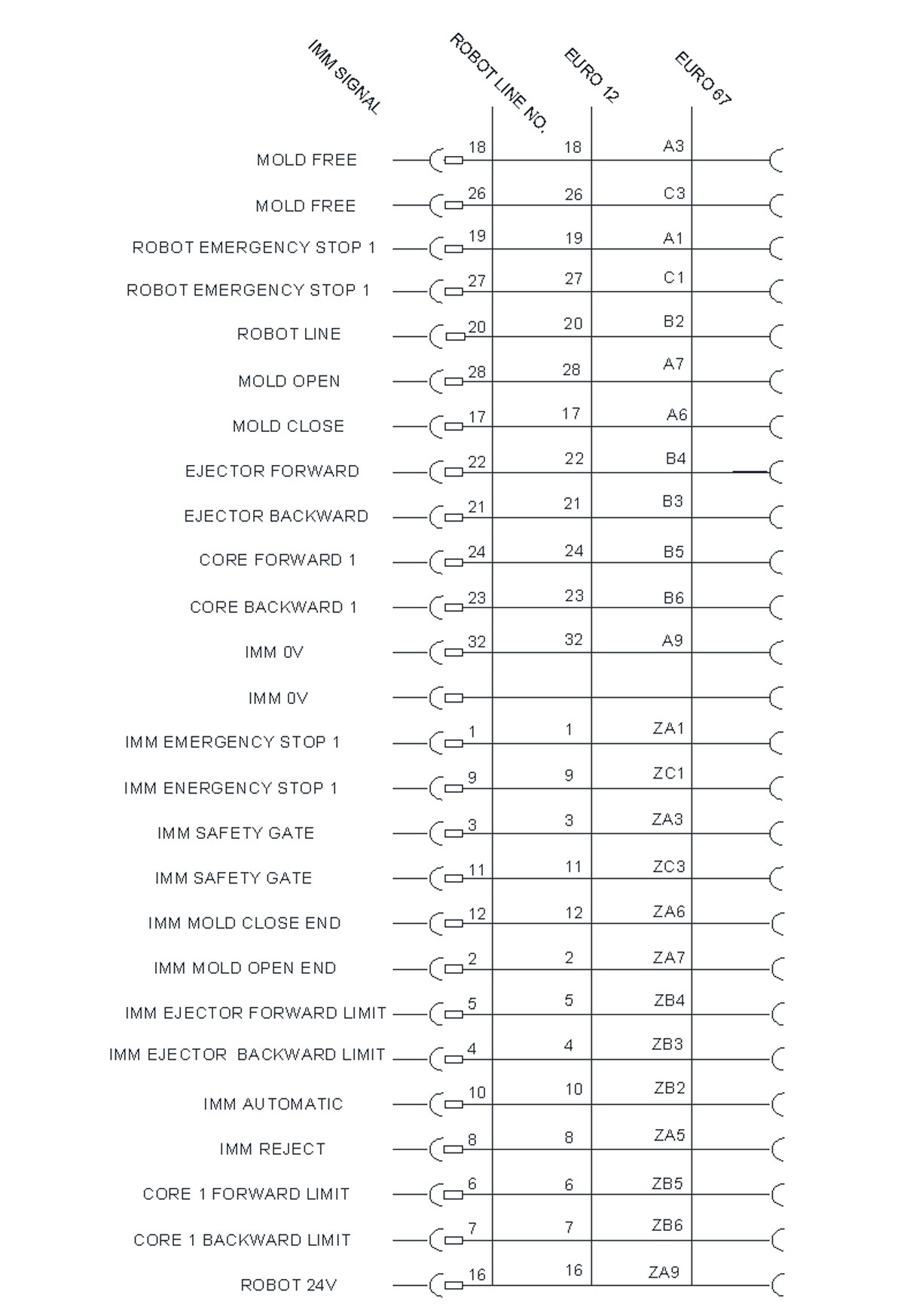
Kommunikation mit der Spritzgießmaschine – EU12/EU67/JIS
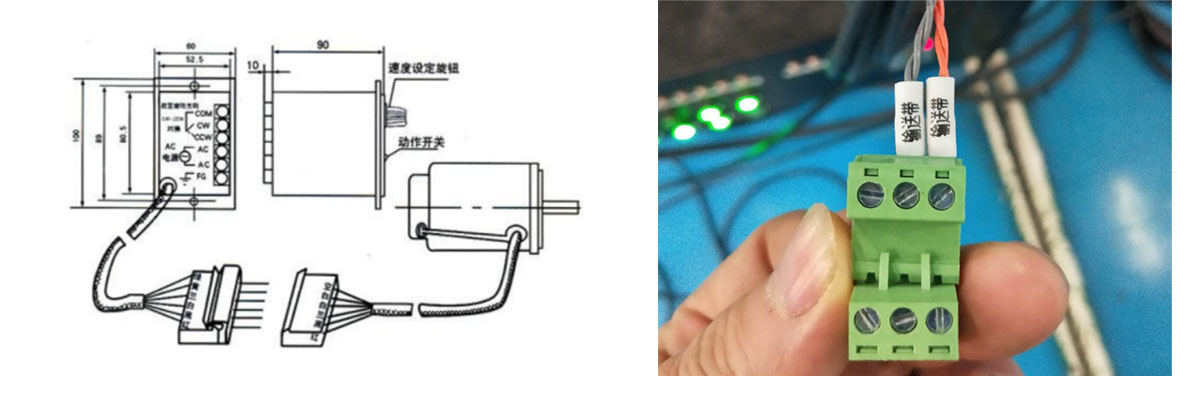
3.4 Anschluss an das Förderband
COM-Punkte und CW/CCW-Punkte im Steuerkasten des Förderbands sind mit seinem Gelenk am Roboter verbunden.
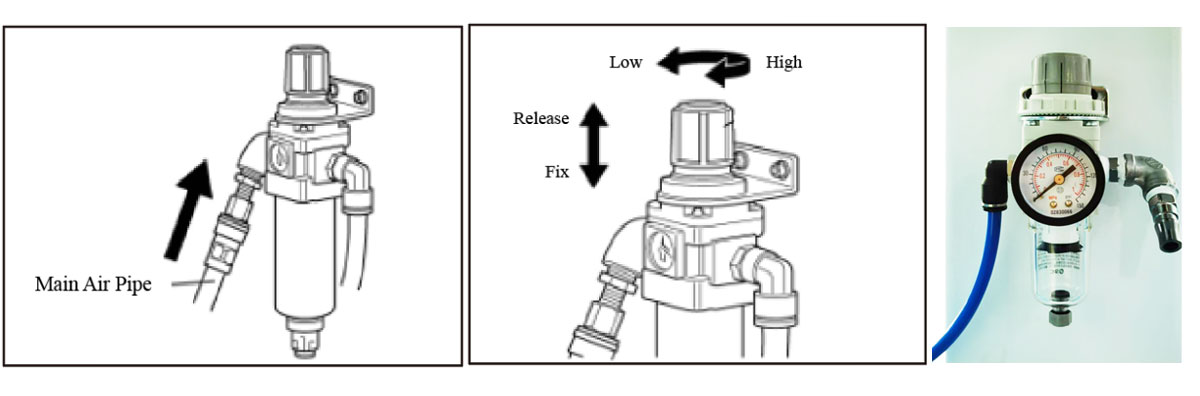
3.5 Luftquelle einschalten
Bitte schließen Sie die vorbereitete Hauptluftleitung an den "IN" des Druckminderventils des Luftfilters an
HINWEIS: Der Druck der beiden Manometer darf nicht weniger als 0,5 MPa betragen und die Luftquelle muss trocken gehalten werden
3.6 Standardmaschine
Alle Rohre und Luftleitungen sollten mit Klebeband reguliert und befestigt und von hohen Temperaturen und heißen Bereichen ferngehalten werden.
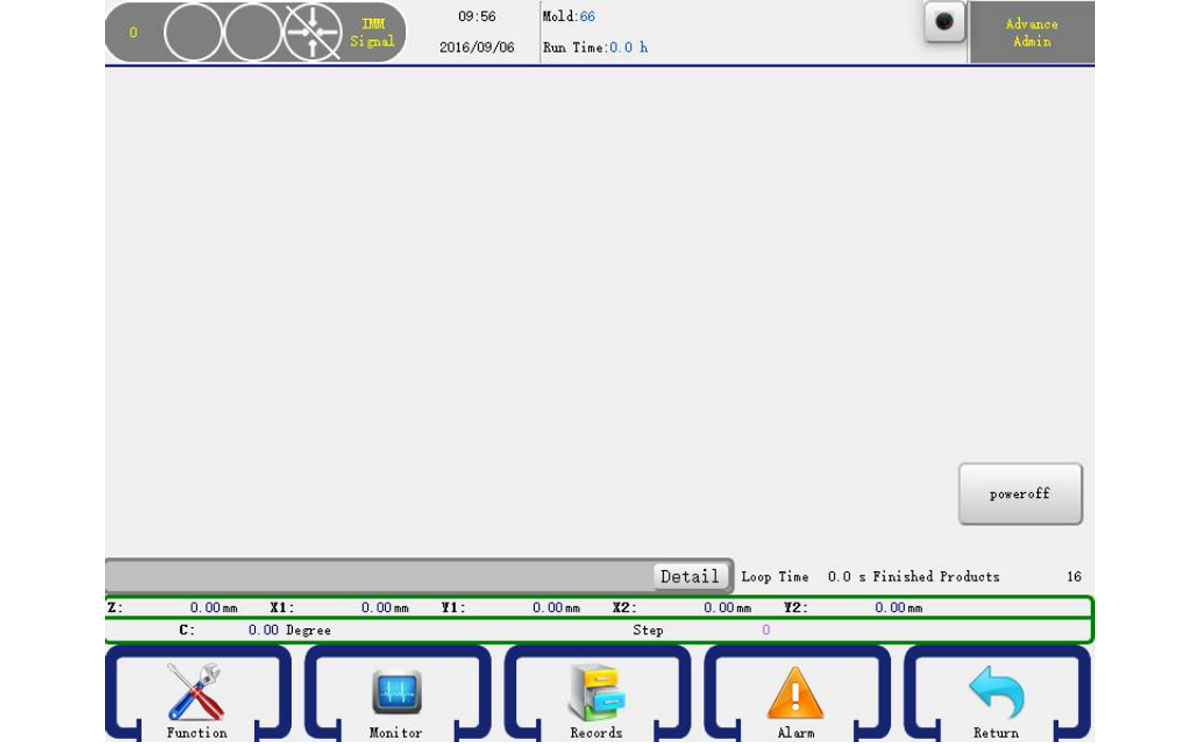
3.7 Maschine einschalten
- Tippen Sie nach dem Systemstart oben rechts auf [OPERATOR], wählen Sie im Dialogfeld [Senior Administrator] und geben Sie das Passwort ein: 123
- Drehen Sie den Knopf oben links auf der Steuerung in die Position „STOPPEN“, drücken Sie dann die Taste „URSPRUNG“, drücken Sie erneut die Starttaste und warten Sie, bis der Roboter zum Ursprung zurückgekehrt ist.
BEREICH 2: Für die Verbindung und den Signalaustausch zwischen Spritzgussmaschine und Manipulator, visueller Bereich.
3.8 Signaltest
- Schalten Sie das Signal „ROBOTERFUNKTION“ ein und prüfen Sie, ob die Spritzgießmaschine die Fingerhutbewegung öffnen und schließen kann. Sie sollte sich nicht bewegen können. Schalten Sie dieses Signal aus und die Spritzgießmaschine sollte frei sein.
- Schalten Sie den Roboter in den manuellen Modus und öffnen Sie die Sicherheitstür der Spritzgießmaschine. Das Signal „Sicherheitstür offen“ wird angezeigt und der Roboterarm darf sich nicht mehr bewegen.
- Im Stoppmodus wird der Roboter gezwungen, das Schließsignal zu öffnen, um zu prüfen, ob die Spritzgießmaschine die Form öffnen und schließen kann. Prüfen Sie nach Abschluss des Öffnens und Schließens, ob das Öffnungs- und Schließsignal an der E/A-Schnittstelle des Roboters erscheint. Überprüfen Sie die Signale für den Fingerhut und den Kernzug auf die gleiche Weise.
- Im manuellen Betrieb lässt sich die Form nicht öffnen und schließen. Prüfen Sie, ob die Spritzgießmaschine die Form öffnen und schließen kann. Sollte die Form nicht geöffnet und geschlossen werden, prüfen Sie den Spannstift und den Kernzug auf die gleiche Weise.
- Bewegen Sie im manuellen Modus den Arm des Roboters in den Formbereich, um zu prüfen, ob die Spritzgussmaschine die Form schließen kann. Die Form sollte nicht geschlossen werden.