
sales06@switek.biz

+86 186 5927 5869

Abonnieren Sie uns
sales06@switek.biz
+86 186 5927 5869
Abonnieren Sie uns
Der Betrieb der Roboterarme erfordert das Zusammenspiel von Steuerungssystem und mechanischer Struktur. Die Elektronikplatine dient als Schnittstelle zwischen Steuerungssystem und mechanischer Struktur der Roboterarme. In diesem Kapitel werden wir die Anschlüsse der in einem Roboterarm verbauten Platinen erläutern.
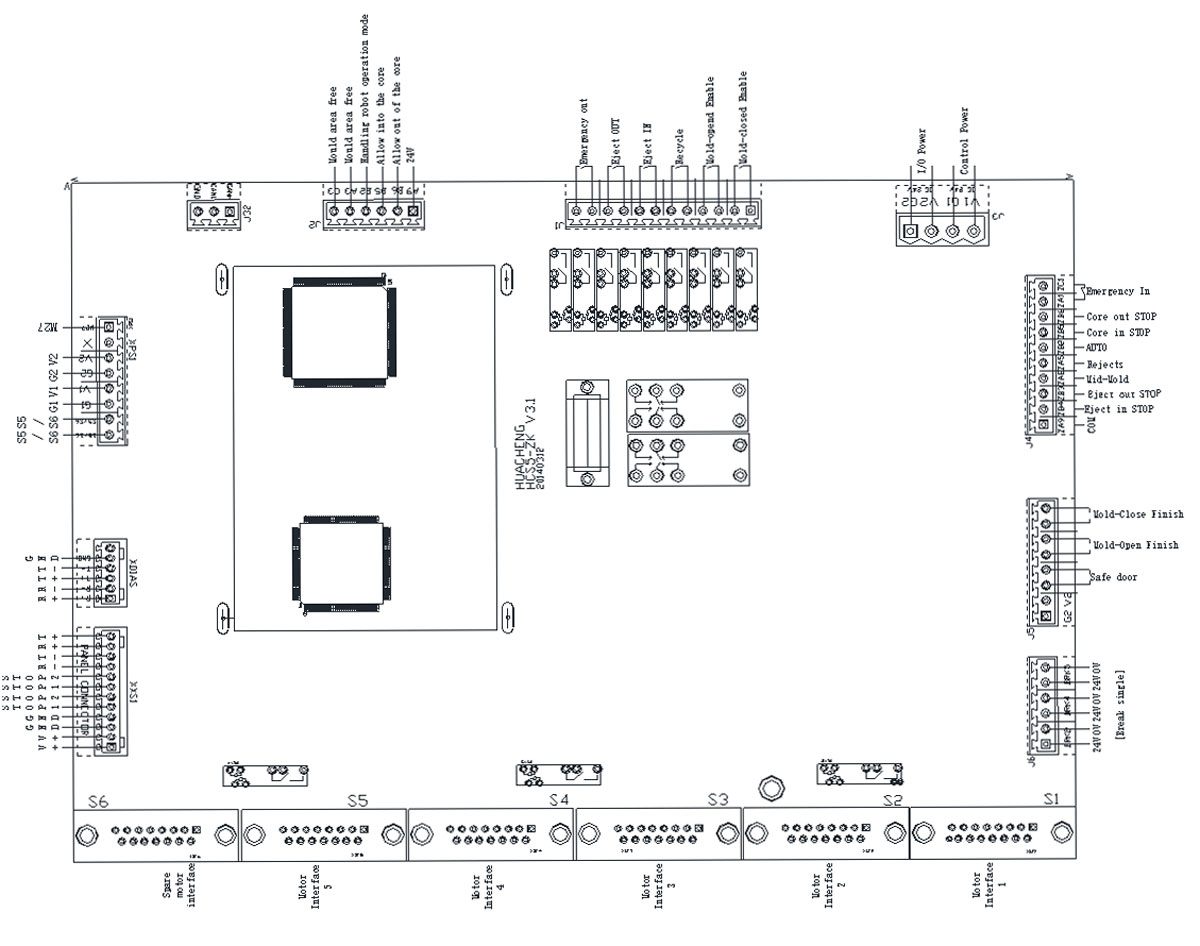
Die obige Zeichnung zeigt die Portbelegung der Hauptplatine von SWITEK 5-Achs-Servo-Spritzgießroboterarmen.
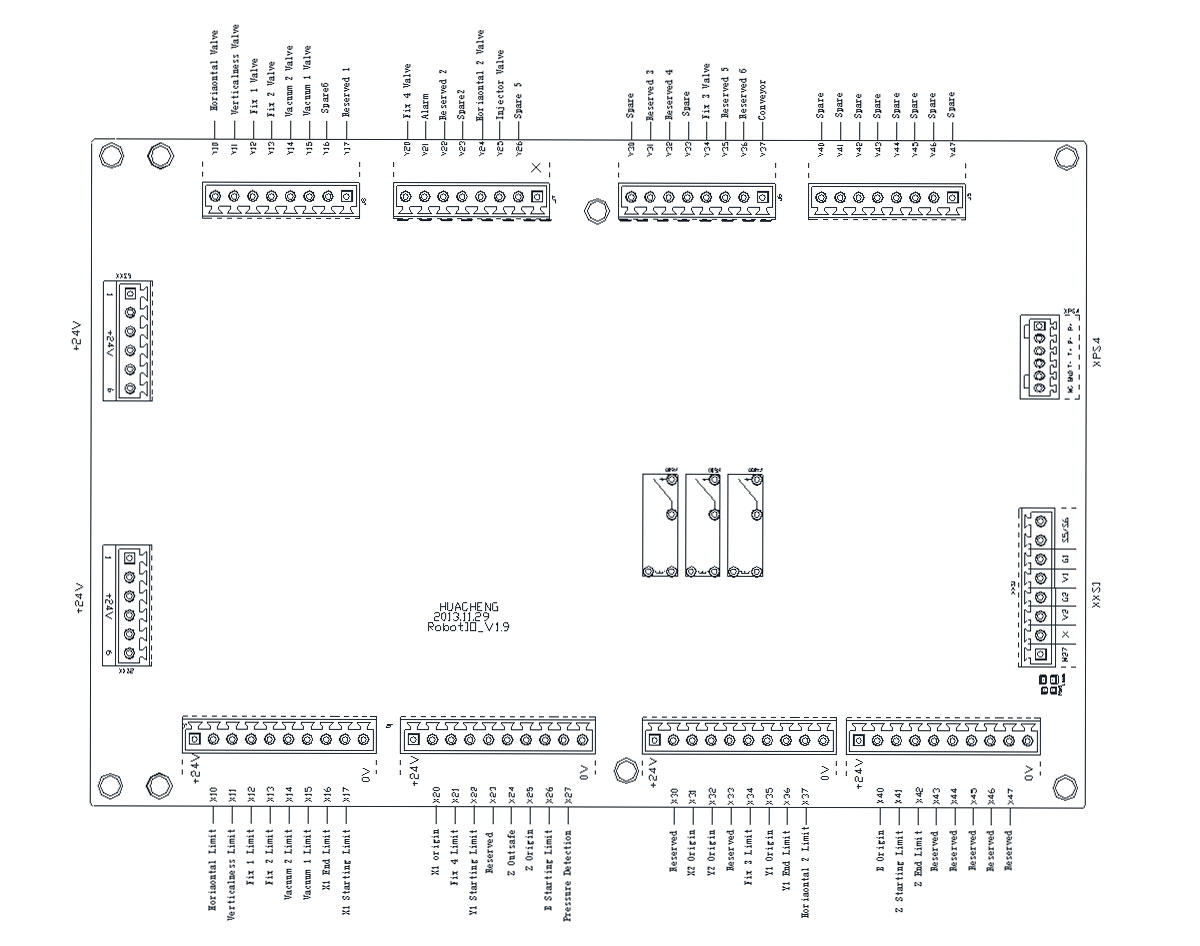
Die obige Zeichnung zeigt die Portbelegung der I/O-Platine von SWITEK 5-Achs-Servo-Injektionsroboterarmen.
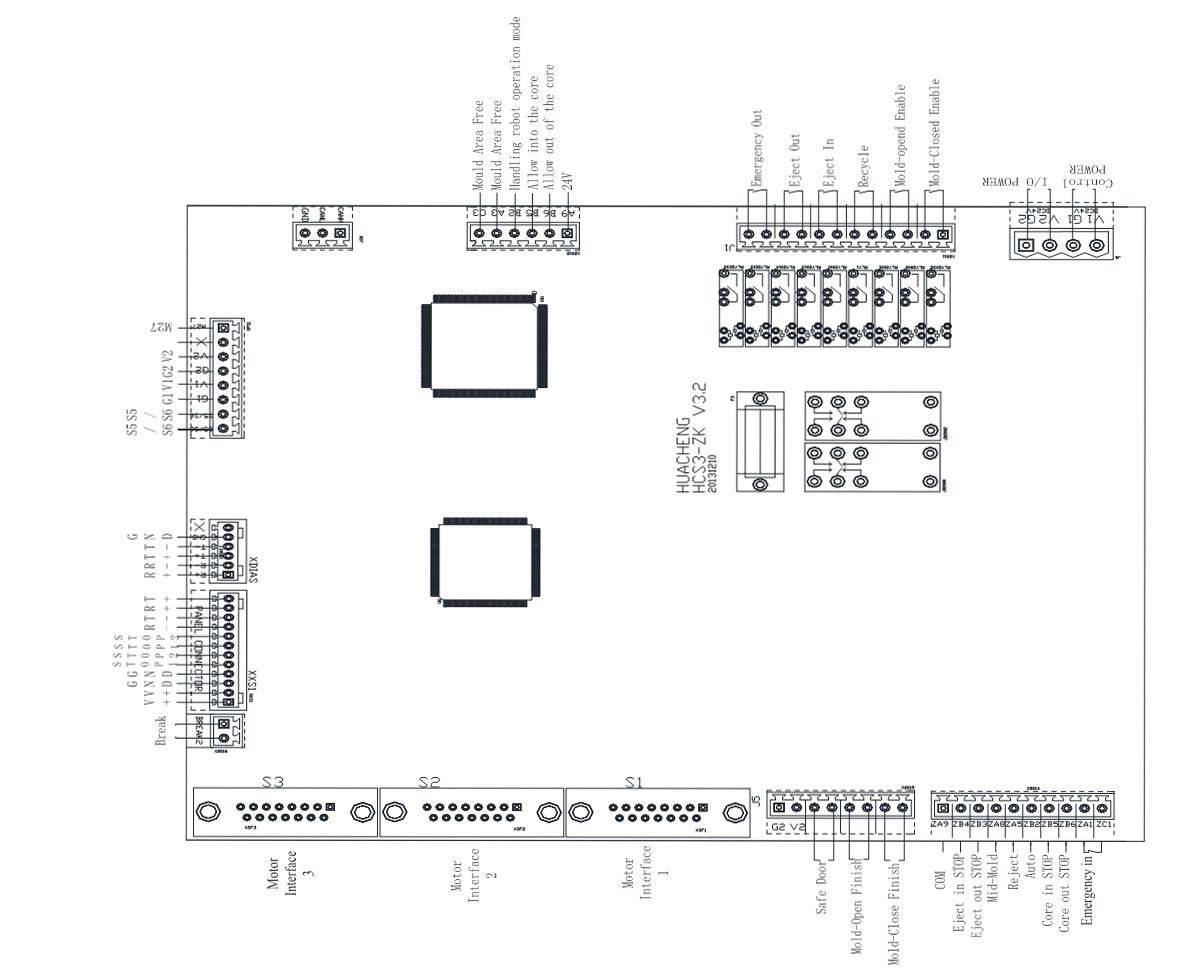
Die obige Zeichnung zeigt die Portbelegung der Hauptplatine von SWITEK 3-Achs-Servo-Injektionsroboterarmen.
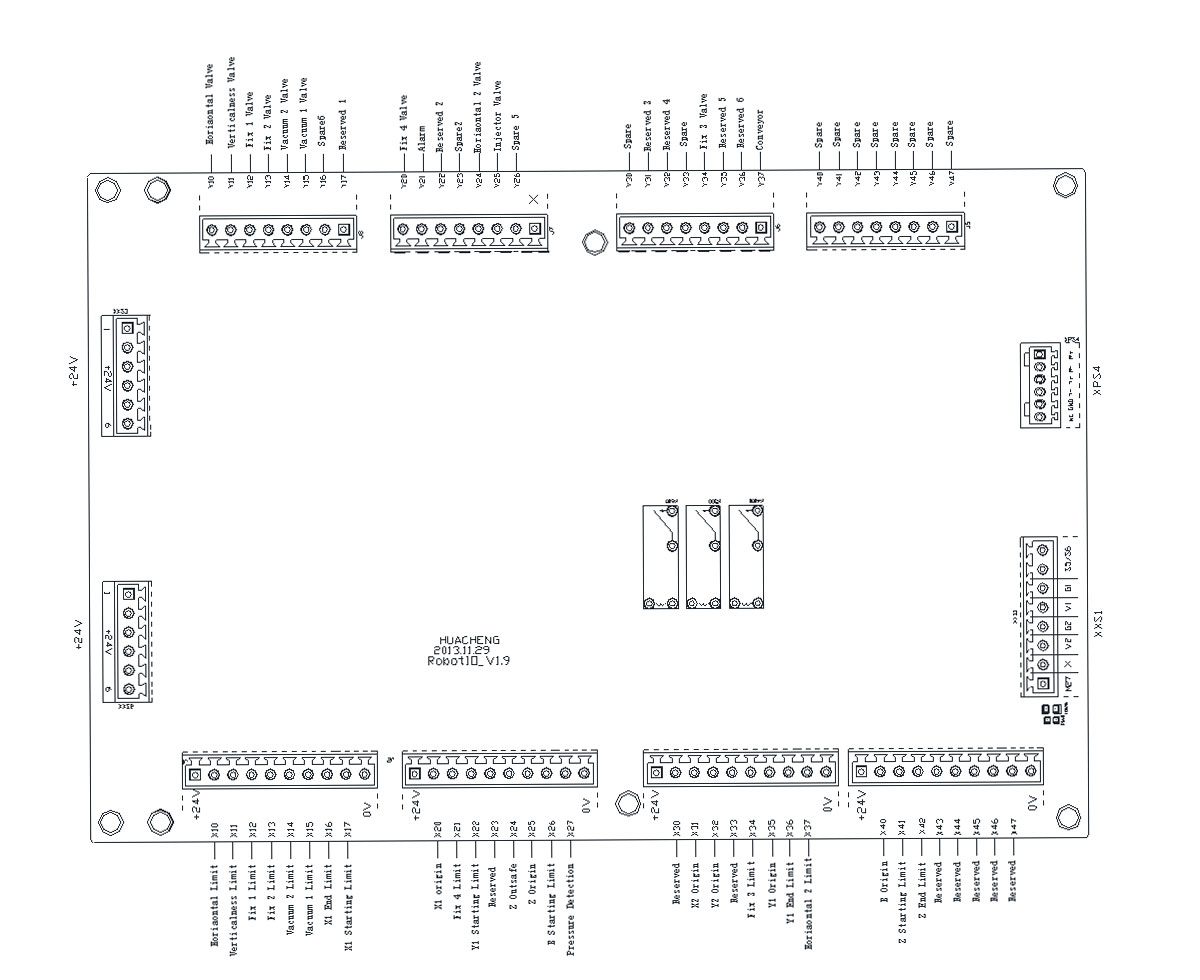
Die obige Zeichnung zeigt die Portbelegung der I/O-Platine der SWITEK 3-Achs-Servo-Injektionsroboterarme.
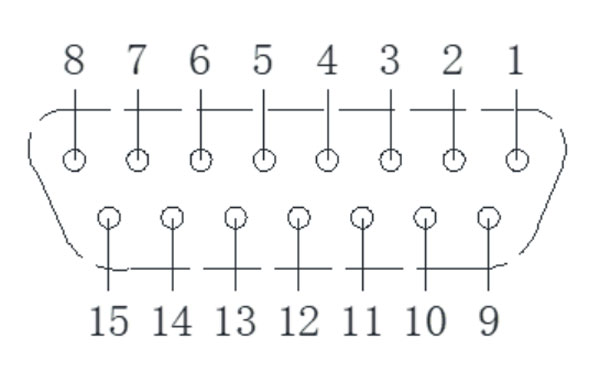
| PIN-Nr. | Terminaldefinition | PIN-Nr. | Terminaldefinition |
|---|---|---|---|
| 1 | +24V | 9 | 0V |
| 2 | OA+ | 10 | P+ |
| 3 | OA- | 11 | P- |
| 4 | OB+ | 12 | BRAKE |
| 5 | OB- | 13 | N+ |
| 6 | OZ+ | 14 | N- |
| 7 | OZ- | 15 | ALM |
| 8 | SON | 15 |
Kontaktieren Sie SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







