
sales06@switek.biz

+86 186 5927 5869

Abonnieren Sie uns
sales06@switek.biz
+86 186 5927 5869
Abonnieren Sie uns
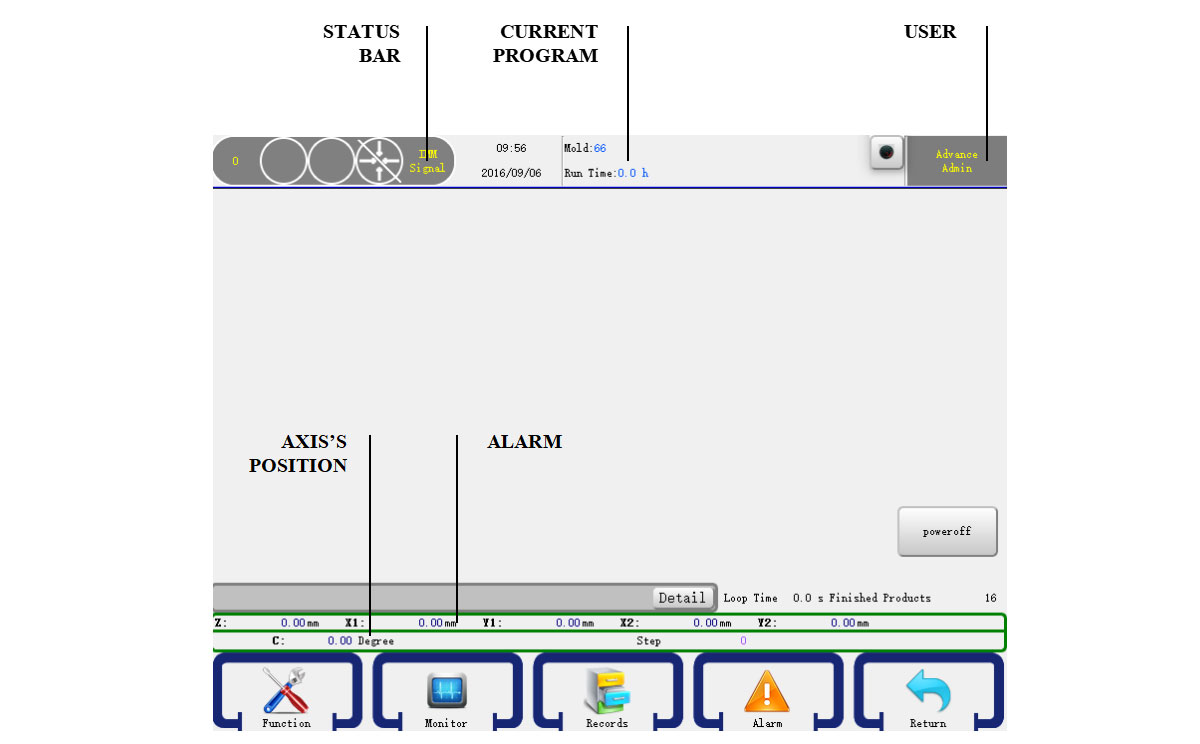
Das Bedienfeld ist die Schnittstelle, über die der Bediener mit dem Roboterarm kommuniziert. Es ermöglicht dem Bediener, die Geschwindigkeit jeder Achse des Roboterarms zu starten, zu stoppen, zu programmieren und anzupassen. In diesem Kapitel geben wir eine kurze Einführung in das Bedienfeld der Roboterarmsteuerung (HMI).
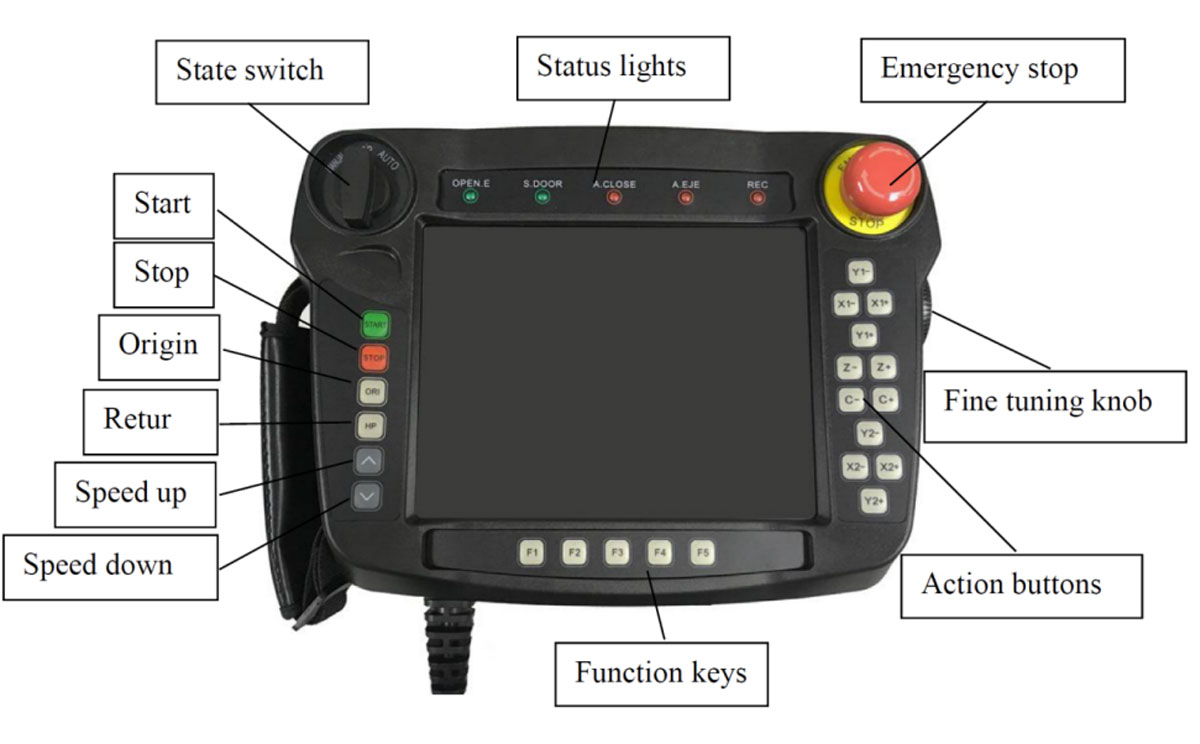
Stoppen Sie den Roboter und andere Maschinen im Notfall sofort.
Für eine präzise Distanzeinstellung ist eine kleine Bewegung der Striche erforderlich.
Bewegen Sie die Achse manuell
Kontaktieren Sie SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right








