
sales06@switek.biz

+86 186 5927 5869

Abonnieren Sie uns
sales06@switek.biz
+86 186 5927 5869
Abonnieren Sie uns
Schlüsselwörter:IML-Roboter; Betrieb eines IML-Roboters; In-Mold-Labeling-Robotik
Nach dem Klicken auf die Schaltfläche „Zone“ gelangen Sie zur Achseneinstellungsseite, auf der der Bediener den Arbeitsbereich der IML-Roboterachse festlegt. Hier finden Sie zwei Seiten: Auf der Seite „Bereichseinstellungen“ können Sie die Parameter des Arbeitsbereichs der IML-Roboterachse einstellen, auf der Seite „Bereichskorrektur“ kann der Bediener die Parameter der IML-Roboterachse anpassen.
Bereichseinstellung

| NEIN. | Name | Funktion |
|---|---|---|
| (1) | Punkteauswahl | Wählen Sie den Bereichs-Extremum aus, den Sie festlegen möchten. |
| (2) | Aktuelle Position speichern | Klicken Sie, um die aktuelle Position der Achse auf den Einstellungswert (3) zu speichern. |
| (3) | Wert festlegen | Klicken Sie hier, um die Einstellung zu ändern. |
| (4) | Position | Die aktuelle Position der Achse wird angezeigt. |
Aera-Korrektur
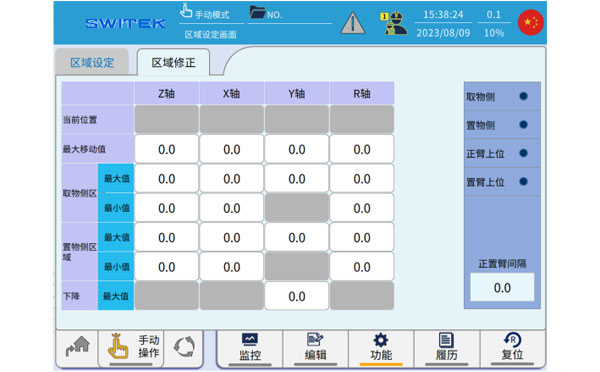
Die in „Bereichseinstellungen“ festgelegten Parameter können in „Bereichskorrektur“ angezeigt und geändert werden.
Die festgelegten Bereichsparameter sollten mit dem Sensorsignal usw. übereinstimmen, und der Manipulator wird alarmiert, wenn er den festgelegten Bereich verlässt oder wenn im Abwärtszustand des Arms eine Tendenz besteht, den festgelegten Bereich zu verlassen.
Kontaktieren Sie SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







