
sales06@switek.biz

+86 186 5927 5869

Abonnieren Sie uns
sales06@switek.biz
+86 186 5927 5869
Abonnieren Sie uns
Schlüsselwörter:IML-Roboter; IML-Roboterbetrieb; In-Mold-Labeling-Robotik
Im Bereich „Teaching“ können Sie das Programm des IML-Roboters überprüfen und bearbeiten. Da es sich um ein modular aufgebautes Steuerungssystem handelt, erhalten Sie nach der Modusauswahl, der Parametereinstellung, der Timer- und Zählereinstellung ein initiales Programm für Ihr IML-Projekt. Auf der Seite „Teaching“ können Sie kleinere Anpassungen am Programm vornehmen, um die Effizienz des IML-Roboters zu optimieren.
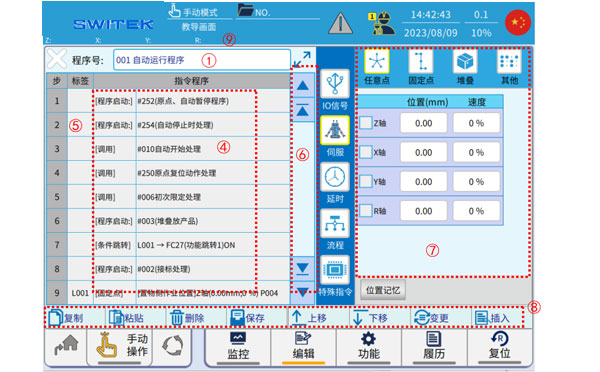
Beschreibung der einzelnen Markierungsbereiche:
| NEIN. | Name | Funktion |
|---|---|---|
| (1) | Programmauswahl/Anzeige | Klicken Sie auf das Popup „Programmliste“, wählen Sie die Programmnummer aus, die Sie hinzufügen, bearbeiten oder anzeigen möchten, und klicken Sie, um die Bearbeitungsoberfläche aufzurufen. |
| (2) | Programmerweiterungsanzeige | Klicken Sie auf  , um die erweiterte Benutzeroberfläche der Programmanzeige aufzurufen und den vollständigen Befehlsinhalt bequem einzusehen. , um die erweiterte Benutzeroberfläche der Programmanzeige aufzurufen und den vollständigen Befehlsinhalt bequem einzusehen. |
| (3) | Zurückkehren | Klicken Sie hier, um die Bearbeitungsoberfläche des Tutorials zu verlassen. Falls das Programm geändert wurde, werden Sie zur Kompilierung aufgefordert. |
| (4) | Unterrichtsinhalt | Der Inhalt des Befehls wird angezeigt. |
| (5) | Spalte mit Beschriftung | Wechseln Sie zum Bearbeitungsbereich des Tabs. Klicken Sie, um vor der Befehlszeile eine Bezeichnung hinzuzufügen (beim Erstellen einer neuen Bezeichnung können Sie auf „EN“ klicken, ohne eine Nummer einzugeben; es wird dann automatisch eine ungenutzte Bezeichnungsnummer hinzugefügt). |
| (6) | Eine erste Liste von Anweisungen |
|
| (7) | Sekundäre Befehlsliste und Parametereinstellungen | Bearbeitung von Unterlistenbefehlen und Parametereinstellungen. |
| (8) | Tastenkombinationen für die Befehlsbearbeitung |
|
| (9) | Achsenpositionsanzeige | Die aktuelle Position jeder Achse wird zur besseren Übersicht angezeigt. |
Nachfolgend finden Sie Details zur Vorgehensweise beim „Lehre“-Programmieren eines IML-Roboters:
Klicken Sie auf den Anzeigebereich für den Programmnamen, um die Programmliste aufzurufen.
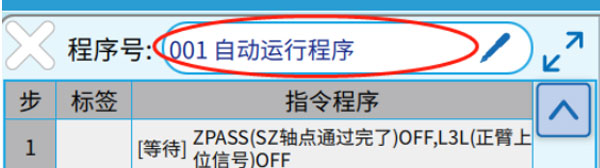
Die Benutzeroberfläche sieht wie folgt aus:
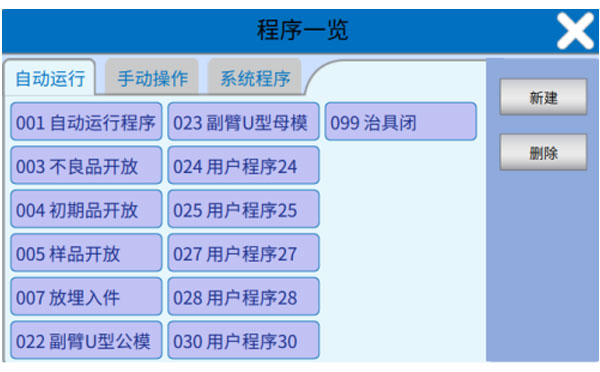
Autorun (001-099): 001 ist das Hauptprogramm, das vom Benutzer bearbeitet werden kann, 024-083 sind vom Benutzer erstellte und bearbeitete Unterprogramme.
Manuelle Bedienung (Nr. 178-Nr. 249):
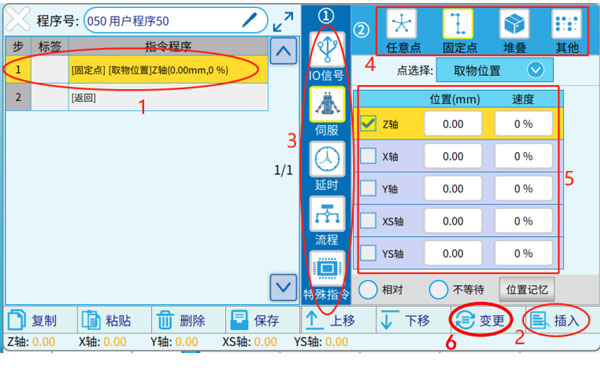
Die Bearbeitungsoberfläche ist wie in der obigen Abbildung dargestellt, und die neue Befehlszeile ist in die folgenden 6 Schritte unterteilt:
Nachfolgend sind einige der am häufigsten verwendeten Befehle aufgeführt:
Beim Unterrichten von Anwendungsprogrammierung wird davon abgeraten, die grundlegende X- und Y-Punkt-Logik für die Standard-E/A-Steuerung der Spritzgießmaschine und des Manipulators (hier: IML-Roboter) zu bearbeiten. Stattdessen sollten die Funktionsunterroutinen des Systems aufgerufen werden, um die Genauigkeit des Programms zu gewährleisten. Diese Unterroutinen befinden sich in der Klasse „IO-Signale“.
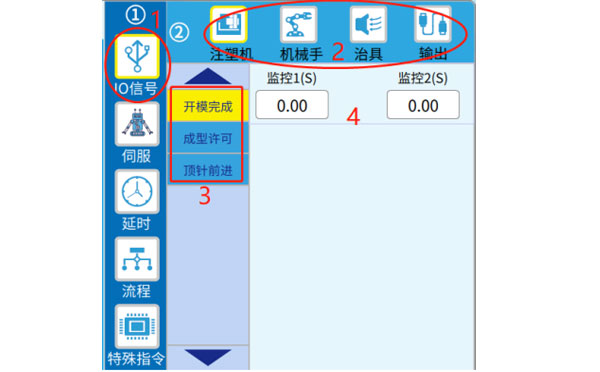
Wie in der obigen Abbildung dargestellt, werden die Programmierschritte schrittweise gemäß 1 (Hauptkategorie), 2 (Unterkategorie), 3 (Spezifische Anweisungen) und 4 (Spezifische Parameter) festgelegt. Nach Abschluss klicken Sie auf „Ändern“ oder „Einfügen“.
Beim Bearbeiten der Komfortfunktionen des IML-Roboters können Sie die Schaltflächen in der folgenden Abbildung verwenden, um die IML-Roboter-Vorrichtungen zu bedienen (Sie können das Ein-/Ausschalten des Sensorsignals beobachten, indem Sie den Punkt rechts ein- oder ausschalten).  Dies erleichtert die Programmierung von Simulationen in realen Betriebsszenarien.
Dies erleichtert die Programmierung von Simulationen in realen Betriebsszenarien.

Die Bearbeitungsschnittstelle zum Ändern der Ausgabelogik des E/A-Punktes sieht wie folgt aus:
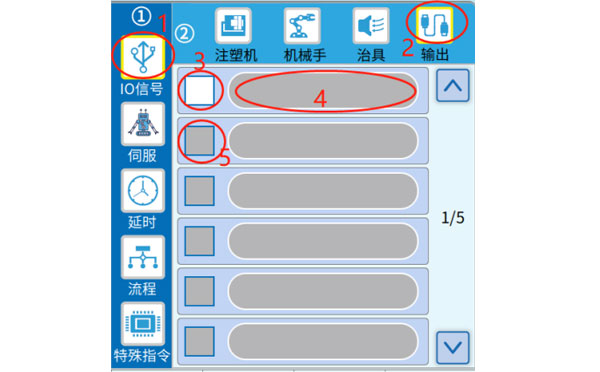
Klicken Sie in der Bearbeitungsoberfläche der obigen Abbildung auf die Beschriftung 3, um Markierung 4 bearbeitbar zu machen. Wählen Sie anschließend aus, ob der Y-Punkt ausgegeben werden soll (EIN oder AUS) und bestätigen Sie. Um die Y-Punkte des IML-Roboters gleichzeitig auszugeben, klicken Sie bei Markierung 5 auf , um die Ausgabe des zweiten Y-Punktes zu bearbeiten. Klicken Sie abschließend auf „Ändern“ oder „Einfügen“.
Bearbeiten Sie die Bewegungsbefehle der Servoachse, einschließlich der Anfahrt zu einem Fixpunkt (der Punkt ist definiert, kann in den „Positionseinstellungen“ geändert und referenziert werden), einem beliebigen Punkt, einem gestapelten Punkt (die Position wird im Menü unter „Stapel“ festgelegt) und dem Befehl „Achse zurück zum Ursprung“ usw. Beispiel: Fixpunkt
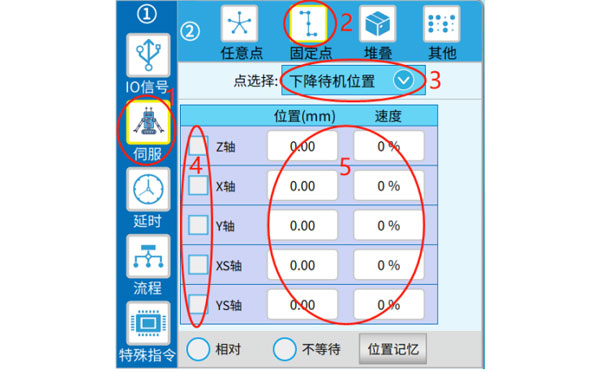
Wie in der obigen Abbildung dargestellt, wählen Sie den gewünschten Punkt bei Markierung 3 aus, anschließend die zu bearbeitende Achse bei Markierung 4 und legen Sie Punkt und Geschwindigkeit bei Markierung 5 fest. Klicken Sie anschließend auf „Ändern“ oder „Einfügen“.
Es gibt zwei Arten von Befehlen zur Bearbeitung von Verzögerungen: die Angabe der Zeit und die Angabe des Timers (die Timerzeit kann geändert werden, wenn er automatisch ausgeführt wird).
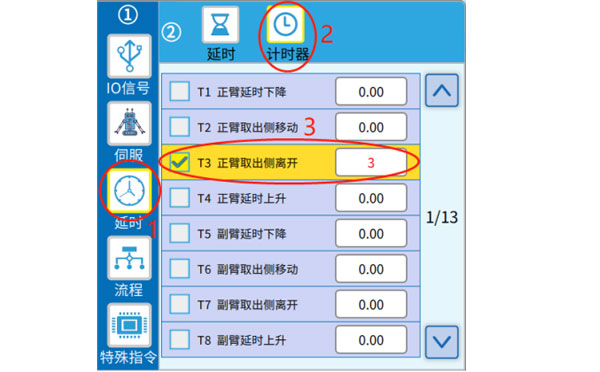
Hinweis: Wenn Sie beim Programmierunterricht einen Timer verwenden möchten, bevorzugen Sie die T85-T100, da es sich um benutzerdefinierte Timer handelt, die nicht spezifisch definiert sind.
Aufruf und Programmstart sind beides Möglichkeiten, Unterprogramme zu verwenden. Der Unterschied besteht darin, dass beim Aufruf eines Unterprogramms gewartet wird, bis die Ausführung der Anweisung im Unterprogramm abgeschlossen ist (bis zur „return“-Anweisung). Der Aufruf gilt dann als abgeschlossen, und die nächste Anweisung im Hauptprogramm kann ausgeführt werden. Beim Start eines Unterprogramms hingegen muss nicht auf dessen Ausführung gewartet werden; der nächste Schritt des Hauptprogramms kann direkt gestartet werden (Hauptprogramm und Unterprogramm werden parallel ausgeführt).
Die Schritte zum Bearbeiten des Programmstartbefehls sind wie folgt:
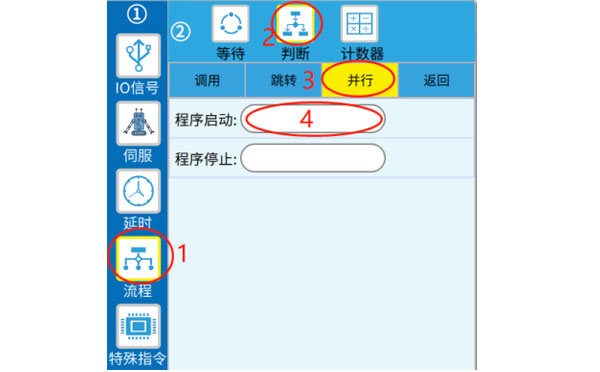
Hinweis: Das Programm startet das geöffnete Unterprogramm, das mit dem Befehl „Programm stoppen“ oben beendet werden kann (unter normalen Umständen wird das Unterprogramm automatisch beendet, nachdem die Ausführung abgeschlossen ist und die Anweisung „return“ erreicht wurde).
Die Schritte zum Bearbeiten des Aufrufbefehls sind wie folgt:
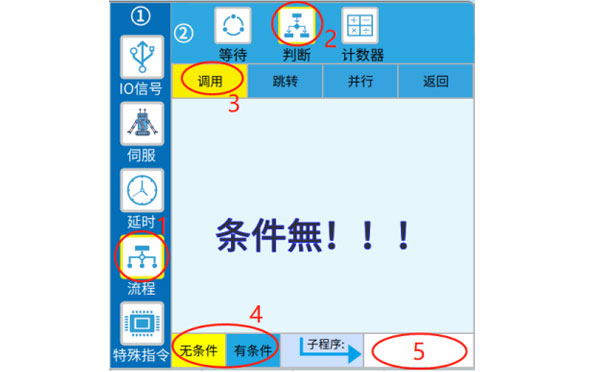
Wie in Symbol Nr. 4 oben dargestellt, können Sie beim Bearbeiten der Aufrufanweisung auswählen, ob eine Bedingung festgelegt werden soll. Wählen Sie dazu: „Bedingungslos“ und geben Sie anschließend an Position 5 die aufzurufende Unterprogrammnummer ein, um den Aufruf abzuschließen. Wenn Sie „Bedingt“ auswählen, müssen Sie zuerst die Bedingung festlegen, dann die Programmnummer an Position 6 eingeben und auf „Ändern“ oder „Einfügen“ klicken.
Beachten Sie, dass, wenn die vorherige Bedingung nicht zutrifft, der nachfolgende Aufruf nicht ausgeführt wird, sondern die nächste Zeile der Anweisungen gestartet wird.
Sprungbefehl: Das Programm wird zum Sprungbefehl ausgeführt, und der nächste Schritt führt die Befehlszeile mit dem entsprechenden Tag aus, anstatt sie in der nächsten Reihenfolge auszuführen.
Sprung/bedingter Sprung, die Schritte zur Befehlsbearbeitung sind wie folgt:

Wählen Sie aus, ob Sie Bedingungen in Feld 4 festlegen möchten, Bedingungen in Feld 5 festlegen möchten (Sie können mehrere Bedingungen festlegen), die Feldnummern in Feld 6 festlegen möchten und wählen Sie „Ändern“ oder „Einfügen“, um Befehle zu generieren. Füllen Sie dann die angezeigte Feldspalte in Feld 7 vor der Zielbefehlszeile aus.
Wird ein bedingter Sprung verwendet, ist die vorherige Bedingungsprüfung ungültig, und der nachfolgende Sprung wird nicht ausgeführt. Die nächste Anweisungszeile wird direkt gestartet. Ist die Bedingung erfüllt, wird die Befehlszeile ausgeführt, die zur entsprechenden Marke springt.
Die Ausgabe des internen Flags ist EIN/AUS, und der Bearbeitungsvorgang wird durch die unten stehende Symbolnummer angezeigt.
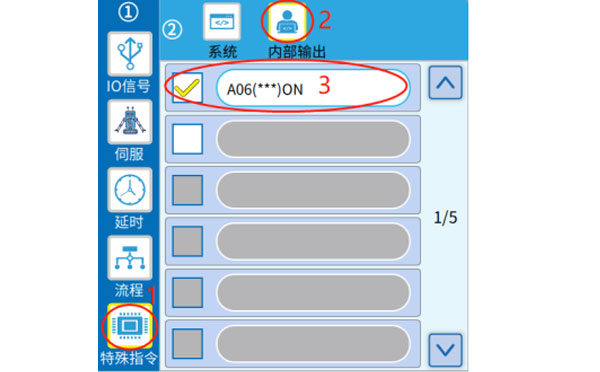
Wie in Symbol 1 oben dargestellt, wählen Sie die zu bearbeitende Befehlszeile aus (gelb markiert) und verwenden Sie dann die Schaltfläche mit der Bezeichnung 2, um die Operation auszuführen.
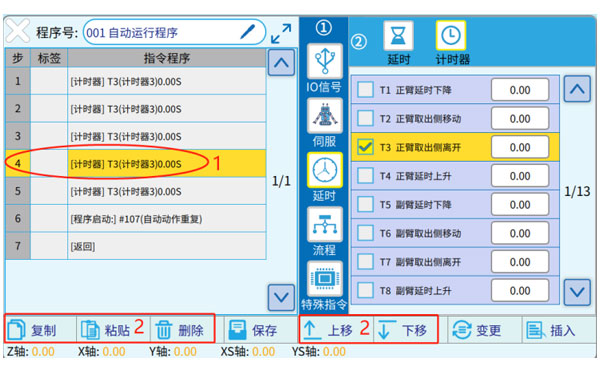
Die Funktionen der einzelnen Tasten sind wie folgt:
Wenn das Programm bearbeitet wird, können Sie auf „Speichern“ oder „ " klicken. Alternativ können Sie zu anderen Einstellungsseiten wechseln, um die Kompilierungsaufforderung auszulösen, auf „Ja“ klicken und warten, bis die Bearbeitung abgeschlossen ist (sie wird nach der Kompilierung automatisch gespeichert).
" klicken. Alternativ können Sie zu anderen Einstellungsseiten wechseln, um die Kompilierungsaufforderung auszulösen, auf „Ja“ klicken und warten, bis die Bearbeitung abgeschlossen ist (sie wird nach der Kompilierung automatisch gespeichert).

Schalten Sie den Schalter in der oberen linken Ecke des Programmiergeräts auf AUTO, um in die automatische Betriebsschnittstelle zu gelangen. Gehen Sie zu „Lernen“, wie unten dargestellt, und klicken Sie auf das Symbol " " in Beschriftung 1, um den erweiterten Bildschirm aufzurufen. Klicken Sie auf Beschriftung 2 „Einzelschritt“, um in den Einzelschrittmodus zu wechseln, und drücken Sie einmal die Taste auf Beschriftung 3 " " das Programm wird auf Schritt 1 zurückgesetzt. Der Programmfortschritt kann unter Punkt 4 eingesehen werden. „Programmnr.“ ist die Nummer des aktuell ausgeführten Programms, und „Schrittnr.“ ist die Nummer des aktuell ausgeführten Programms.
" das Programm wird auf Schritt 1 zurückgesetzt. Der Programmfortschritt kann unter Punkt 4 eingesehen werden. „Programmnr.“ ist die Nummer des aktuell ausgeführten Programms, und „Schrittnr.“ ist die Nummer des aktuell ausgeführten Programms.

Kontaktieren Sie SWITEK IML
sales06@switek.biz
+86 186 5927 5869

DongGuan, GuangDong, China
HuangYanZheng©Copy Right







