SWITEK Roboterarme für Spritzgussmaschinen – Installationsanleitung – Kapitel 7: Funktionskonfigurationen
Abstrakt
Die Programmierung eines Roboterarms für eine Spritzgießmaschine umfasst nicht nur die Einstellung der Achsenposition, das Aktivieren/Deaktivieren der Zylinder und anderer EOAT-Teile usw., sondern auch die Signaleinstellungen für die Kommunikation des Roboters mit der Spritzgießmaschine, die Produkteinstellungen, die Stapeleinstellungen, die Maschinenkonfiguration, die Systemeinstellungen, die Sicherheitspunkteinstellungen usw. In diesem Kapitel erläutern wir Schritt für Schritt, wie diese Parameter der Roboterarme konfiguriert werden.
Klicken Sie im Stoppstatus auf das Funktionsmenüelement in der Hauptmenüleiste, um zur Funktionskonfigurationsseite zu gelangen. Wie unten gezeigt:
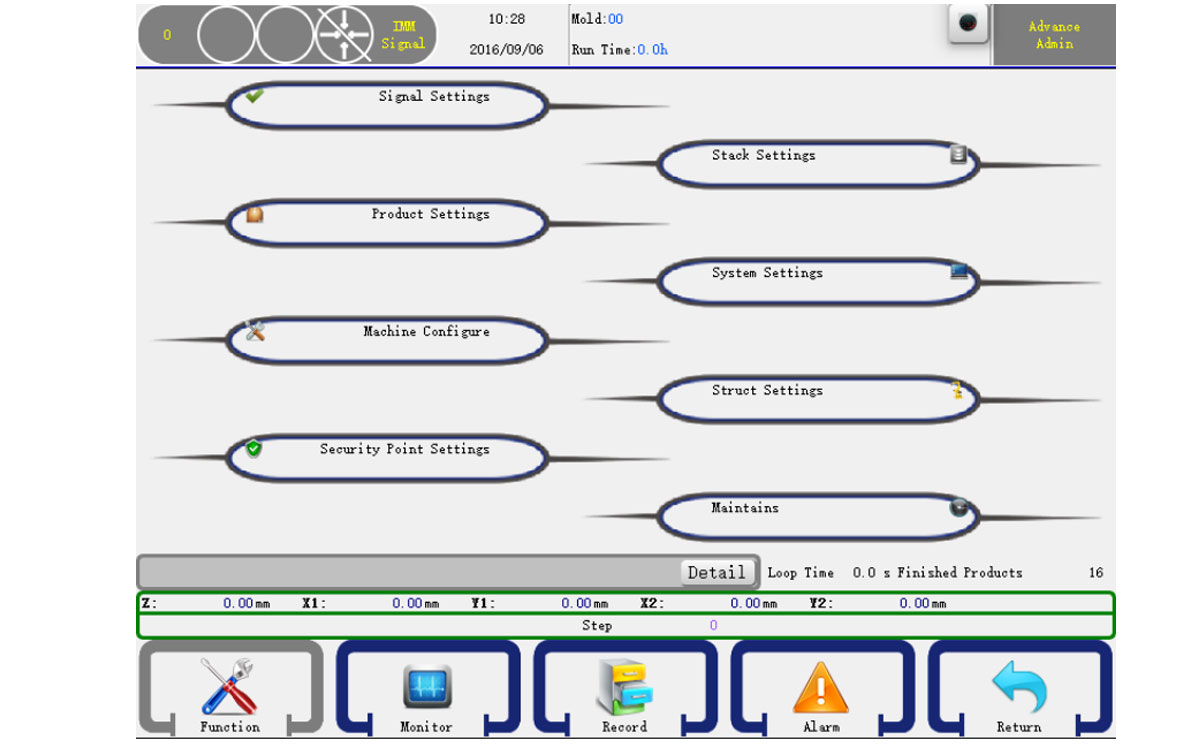
Sie können auf dieser Seite eine Funktionsgruppe auswählen. Klicken Sie auf das Element, um die entsprechende Detaileinstellungsseite zu öffnen. Die Struktureinstellungen können nur vom erweiterten Administrator festgelegt werden.
7.1 Signaleinstellungen
Klicken Sie auf das Element „Signaleinstellungen“, um zur Signaleinstellungsseite zu gelangen, wie unten gezeigt:

- Gerät 1–4 erkennen:
Positiv: Prüfen, ob das Geräteeingangssignal eingeschaltet ist.
Umgekehrt: Prüfen, ob das Geräteeingangssignal ausgeschaltet ist. - Sub-Gerät
Positiv: Prüfen Sie, ob das Geräte-Eingangssignal eingeschaltet ist.
Umgekehrt: Prüfen Sie, ob das Geräte-Eingangssignal ausgeschaltet ist. - Position erkennen:
Horizontal:Die Haltung muss bei der Verfahrbewegung horizontal sein.
Vertikal:Die Haltung muss bei der Verfahrbewegung vertikal sein.
Keine Begrenzung:Keine Begrenzung: Keine Erkennung. - Ursprung erkennen:
Horizontal:Die Haltung des Roboterarms muss bei der Verfahrbewegung horizontal sein.
Vertikal:Die Haltung des Roboterarms muss bei der Verfahrbewegung vertikal sein.
Keine Begrenzung:Keine Begrenzung: Keine Erkennung. - U/D-Position:
Horizontal: Die Haltung des Roboterarms muss bei der Verfahrbewegung horizontal sein.
Vertikal: Die Haltung des Roboterarms muss bei der Verfahrbewegung vertikal sein.
Keine Begrenzung: Keine Begrenzung: Keine Erkennung. - Hor Standby:
Form mit Endverriegelung: Das Schließen der Form wird erst aktiviert, nachdem der Roboterarm nach oben in die Standby-Position gefahren ist.
Form ohne Endverriegelung: Das Schließen der Form wird aktiviert, sobald der Roboterarm mit der Aufwärtsbewegung beginnt. - Form schließen:
Anwendung: Der Roboter fährt zur Teileentnahme erst in die Form ein, wenn nach dem Signal Form geschlossen das Signal Form geöffnet ausgegeben wird. Andernfalls wird der Alarm Form nicht verriegelt ausgegeben.
Nicht verwenden: Der Roboter erkennt das Signal Form geschlossen nicht, fährt aber zur Teileentnahme in die Form ein, sobald das Signal Form geöffnet empfangen wird. - Sicherheitstür erkennen:
Verwendung: Alarm, wenn die Sicherheitstür geöffnet ist, während der Roboter automatisch läuft, unabhängig von der Aktion.
Nicht verwenden: Alarm, wenn die Sicherheitstür geöffnet ist, während der Arm nach unten bewegt wird. - Druck erfassen:
Verwendung: Der Roboter prüft den Druckluftdruck. Liegt dieser unter dem Standardwert, wird ein Alarm ausgelöst.
Keine Verwendung: Der Druck wird nicht geprüft. - Mittelformerkennung:
Anwendung: Der Roboter prüft das Mittelformsignal. Wenn beim Absenken des Roboterarms in der Form kein Mittelformsignal vorhanden ist, wird ein Alarm ausgelöst.
Keine Anwendung: Das Mittelformsignal wird nicht geprüft. - Auswerfer-Link-Sperre:
Anwendung: Das Auswerfer-Freigabesignal ist nach dem Öffnen der Form deaktiviert. Das Signal „Auswerfer-Freigabe“ muss in das Programm eingefügt werden.
Keine Verwendung: Das Signal „Auswerfer-Freigabe“ ist normalerweise aktiviert. - Autobetrieb
Anwendung: Der Roboter prüft das Auto-Signal der Spritzgießmaschine. Wird im Autobetrieb kein Signal erkannt, wird ein Alarm ausgelöst. Keine Anwendung: Der Roboter prüft das Auto-Signal der Spritzgießmaschine nicht.
7.2 Produkteinstellungen
Klicken Sie auf die Schaltfläche Produkteinstellungen, um zur Produkteinstellungsseite zu gelangen, wie unten gezeigt:
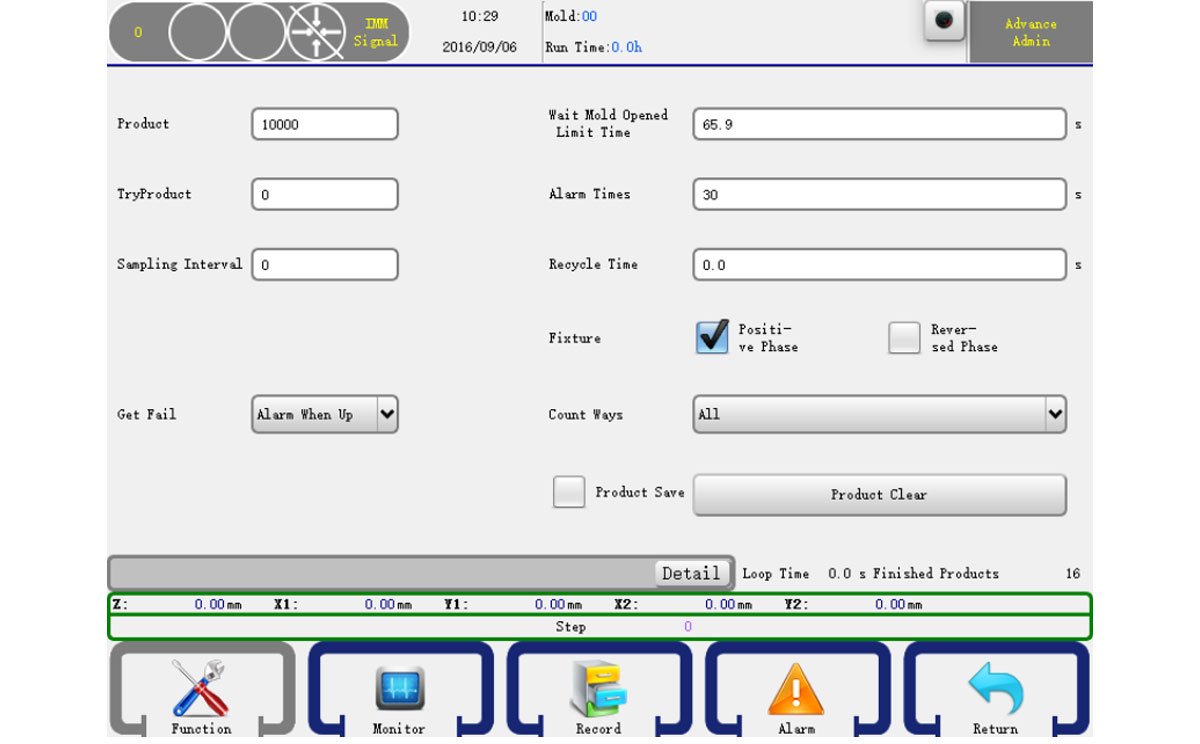
- Produkt: Legen Sie die Produktanzahl fest. Wenn die von Ihnen festgelegte Anzahl überschritten wird, wird ein Alarm ausgelöst.
- Probeproduktion: Die Anzahl der Produkte für die Probeproduktion.
- Probenintervall: Das Intervall, in dem eine Probe zur Qualitätskontrolle entnommen wird.
- Fehlermeldung:
Alarm bei Aktivierung: Aktivierung und Alarm bei Erkennung des Fehlersignals.
Alarm: Alarm wird ausgelöst, wenn die Teileentnahme fehlgeschlagen ist. - Wartezeit bis Form geöffnet, begrenzte Zeit: Die Wartezeit bis zum Signal Form geöffnet. Der Roboter gibt einen Alarm aus, wenn die Wartezeit länger als die Einstellung ist.
- Alarmzeiten: Die Dauer des Alarms.
- Produkt löschen: Löschen Sie die Anzahl der fertigen Produkte.
- Recyclingzeit: Bei Auswahl der Funktion Form gesperrt wird die Zeit angegeben, in der das System das Signal Form geschlossen bis zum Signal Form aktivieren AUS empfangen hat.
7.3 Maschinenkonfiguration
Klicken Sie auf die Schaltfläche Maschine konfigurieren, um zur Seite „Maschine konfigurieren“ zu gelangen, wie unten gezeigt:
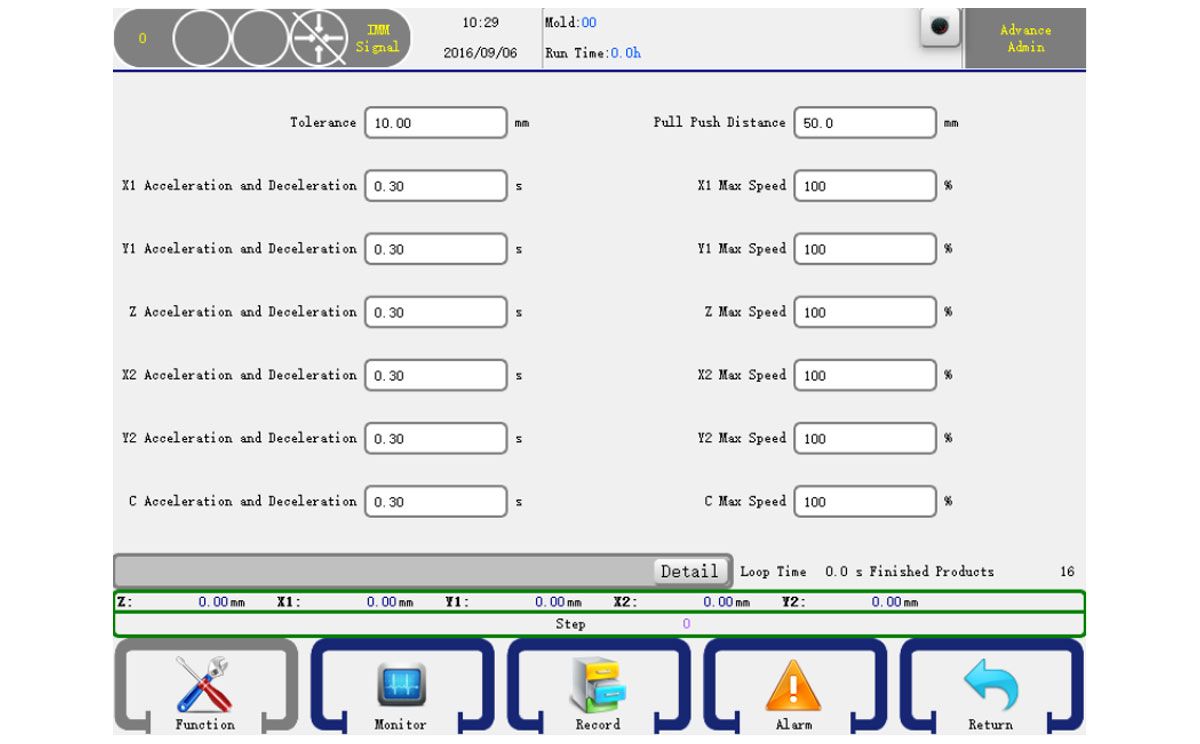
Toleranz:Die Toleranz zwischen dem gesendeten Impuls und dem Rückmeldeimpuls des Servos.
Sicherheitsbereich:Ein Sicherheitsbereich zwischen Armen und Unterarmen.
X-, Y-, Z-Beschleunigung und -Verzögerung:Die Beschleunigungs- und Verzögerungszeit der Servoachse.
X-, Y-, Z-Maximalgeschwindigkeit:Die maximale Geschwindigkeit der Servoachse.
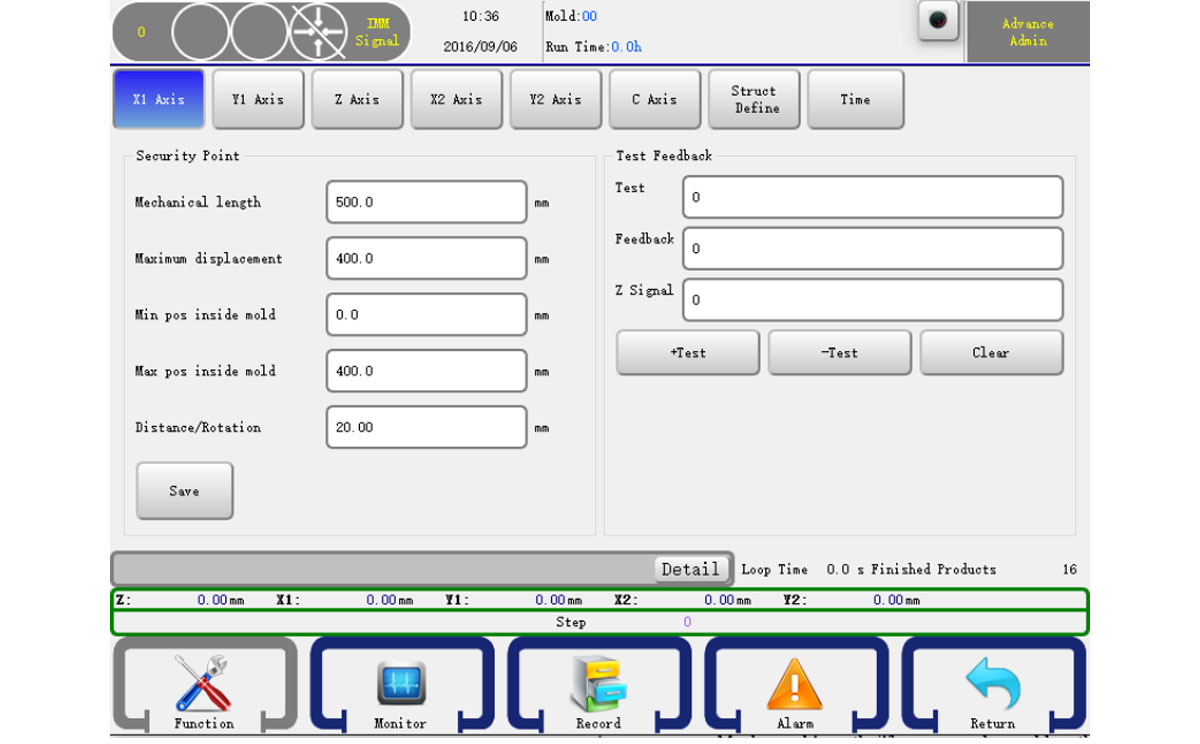
7.4 Sicherheitspunkteinstellungen
Klicken Sie auf die Schaltfläche Sicherheitspunkteinstellungen, um zur Seite mit den Sicherheitspunkteinstellungen zu gelangen, wie unten gezeigt:
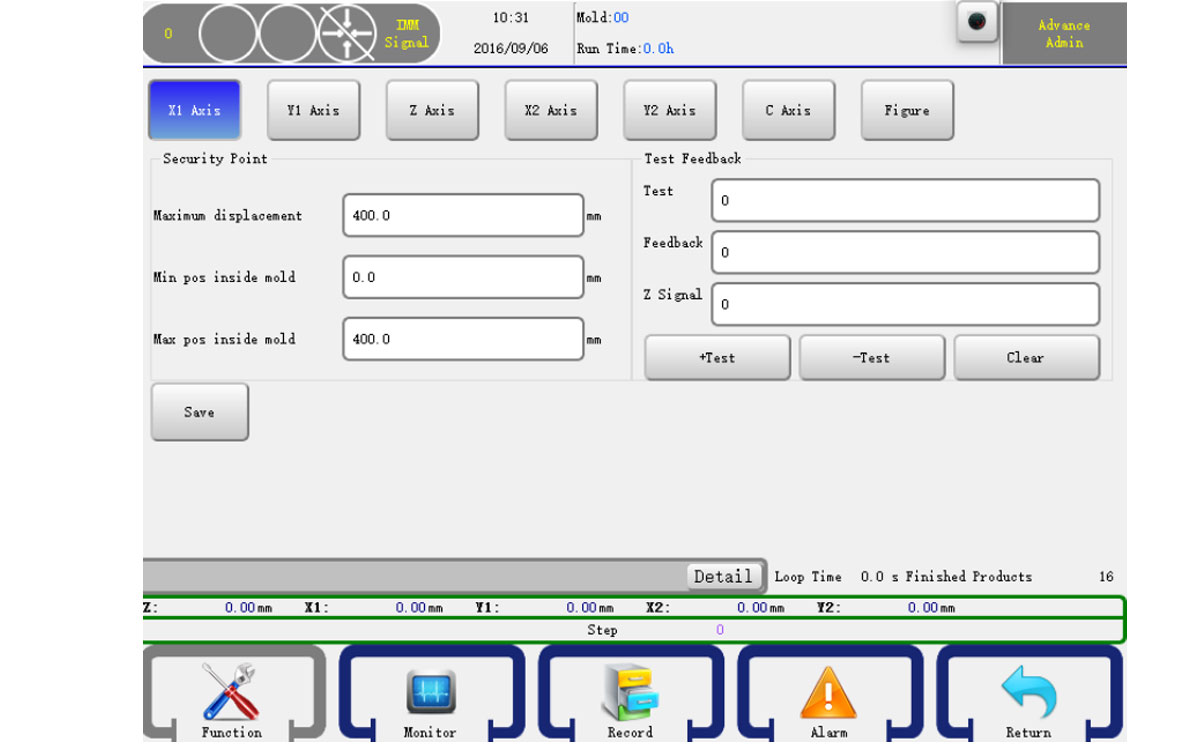
- Drücken Sie oben auf das Menüelement X, um die gewünschte Achse auszuwählen.
Max:Die maximale Achsenbewegung.
Maximum innen:Die maximale Position, die die Achse in der Maschine bewegen kann.
Minimum innen:Die minimale Position, die die Achse in der Maschine bewegen kann.
+Test:Testen Sie den positiven Servoimpuls.
-Test:Testen Sie den Servoreserveimpuls.
Löschen:Löschen Sie die Testdaten.
Bestätigen Sie anschließend mit der Schaltfläche „i“. - Drücken Sie oben auf das Menüelement Y1, um die gewünschte Achse auszuwählen.
Maximaler Standby: Stellen Sie die maximalen Punkte der Standby-Position der Y1-Achse ein.
Abstand zum Ursprung: Position von Y1 vor dem OPR-Vorgang.
Drücken Sie oben auf das Menüelement Y1, um die gewünschte Achse auszuwählen. - Drücken Sie oben auf das Menüelement Z, um die gewünschte Achse auszuwählen.
Sicherheitszone innen:Einstellung der Sicherheitszone innerhalb der Maschine.
Sicherheitszone außen:Ein Sicherheitsabstand außerhalb der Maschine. - Drücken Sie oben auf das Menüelement C, um die gewünschte Achse auszuwählen.
Quersicherheitsbereich: Ein Sicherheitswinkel bei Querbewegungen. - Drücken Sie oben auf den Menüpunkt „Struktur“. Wie unten gezeigt:
Min. Erhöhung innerhalb der X-Achse:Mindestposition für X beim Anheben des Arms in die Maschine.
Max. Erhöhung innerhalb der X-Achse:Maximale Position für X beim Anheben des Arms.
Min. Erhöhung außerhalb der Y-Achse:Mindestposition für Y beim Anheben des Arms aus der Maschine.
Max. Erhöhung außerhalb der Y-Achse:Maximale Position für Y beim Anheben des Arms.
Achtung: Sie können die minimale und maximale Position von X im Parameterfeld der X-Achse auf der Seite mit den mechanischen Parametern ändern.
7.5 Stapeleinstellungen
Klicken Sie auf das Element Stack-Einstellungen, um zur Seite mit den Stack-Einstellungen zu gelangen, wie unten gezeigt:
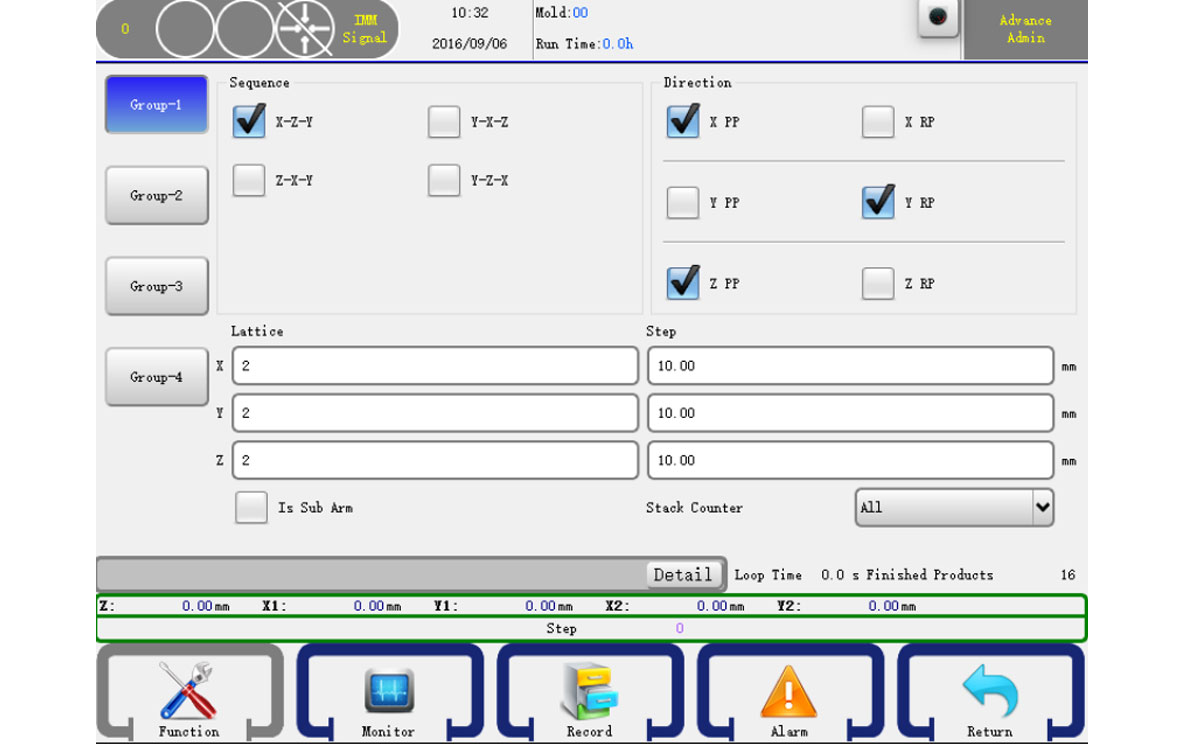
Unser System bietet vier Stapelgruppeneinstellungen.
Sequenz:Wählen Sie die Stapelsequenz.
X RP:Wenn aktiviert, stapelt der Roboter rückwärts auf der X-Achse.
Y RP:Wenn aktiviert, stapelt der Roboter rückwärts auf der Y-Achse.
Z RP:Wenn aktiviert, stapelt der Roboter rückwärts auf der Z-Achse.
7.6 Systemeinstellungen
7.6.1 Einstellung
Klicken Sie auf das Element Systemeinstellungen, um zur Seite mit den Systemeinstellungen zu gelangen, wie unten gezeigt:
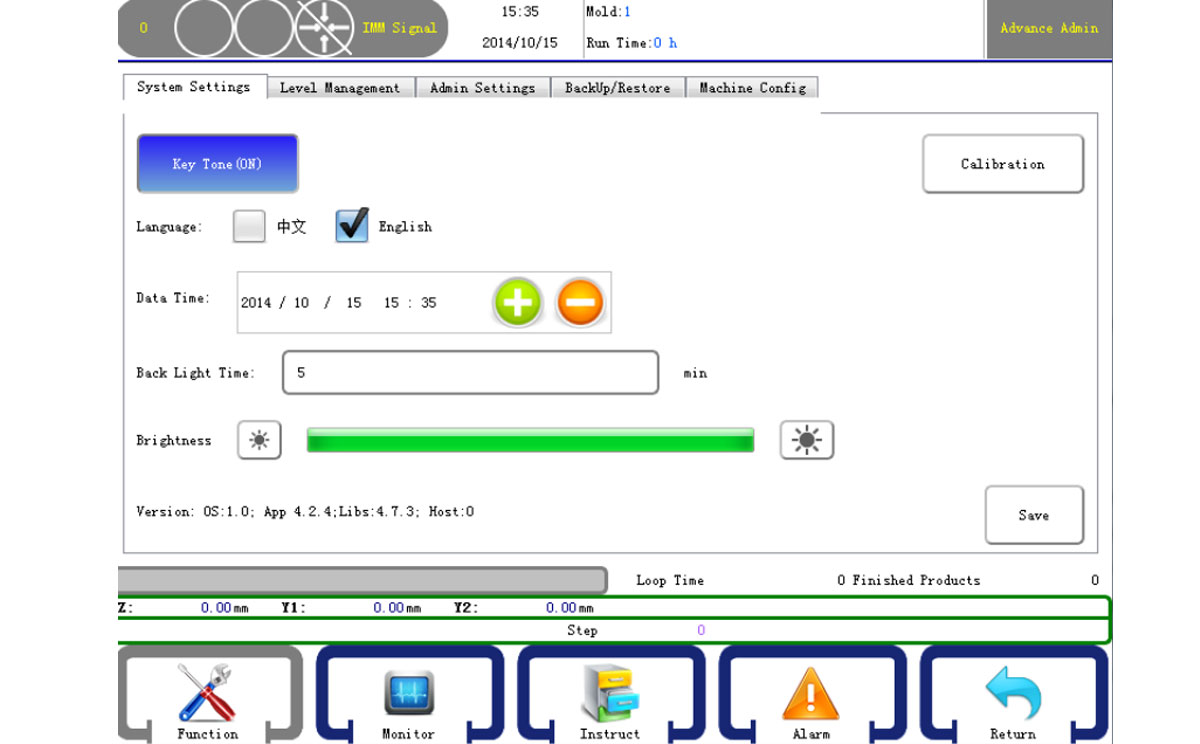
Tastenton: Beim Drücken ertönt ein Signalton, sofern die Tastatur eingeschaltet ist.
Sprache: Wählen Sie die Sprache der Benutzeroberfläche.
Datum/Uhrzeit: Stellen Sie das aktuelle Datum und die aktuelle Uhrzeit ein.
Hintergrundbeleuchtung: Wenn innerhalb der eingestellten Zeit keine Aktion erfolgt, wird die Hintergrundbeleuchtung ausgeschaltet.
Version: Die Systemversion.
Klicken Sie auf Speichern, um die Systemeinstellungen zu bestätigen.
7.6.2 Ebenenverwaltung
Klicken Sie auf das Element Levelverwaltung, um zur Seite mit den Systemeinstellungen zu gelangen, wie unten gezeigt:
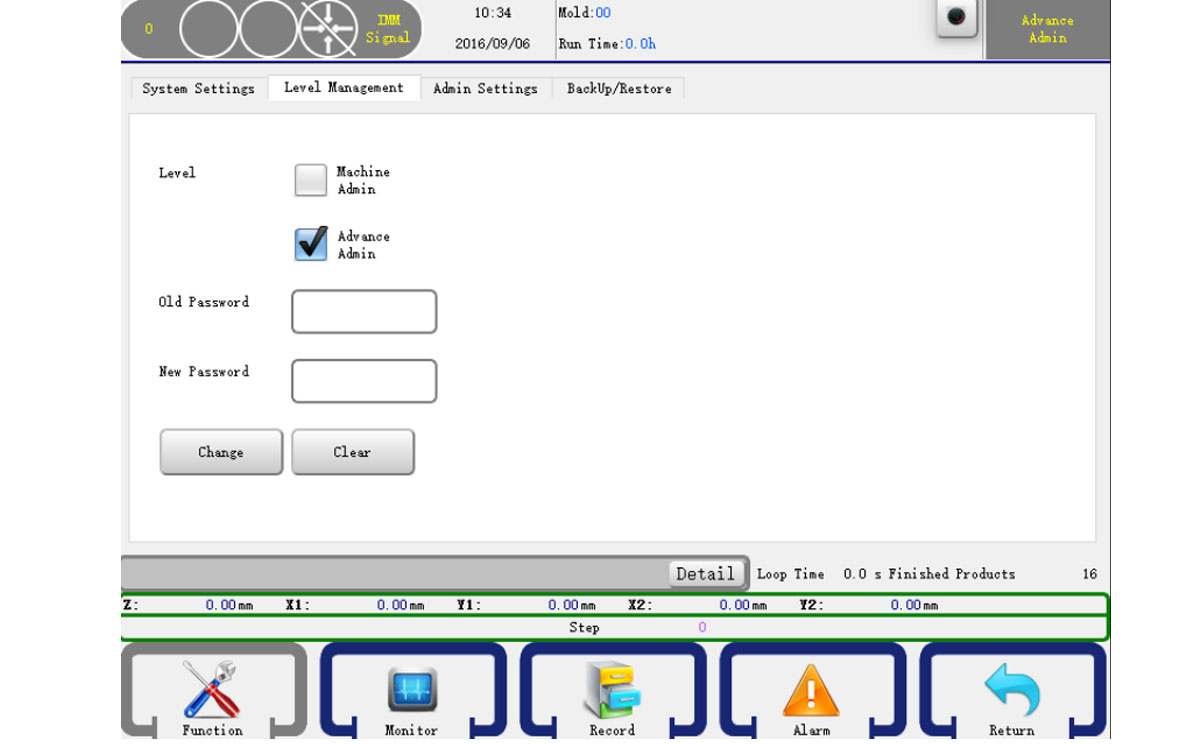
Die Ebenenverwaltung kann die Basisinformationen ändern, während der Administrator alle Parameter ändern kann. Geben Sie das alte Passwort ein, geben Sie anschließend ein neues ein und bestätigen Sie die Eingabe. Sie können das Passwort ändern.
7.6.3 Sichern/Wiederherstellen
Klicken Sie auf das Element Sichern/Wiederherstellen, um zur Seite mit den Systemeinstellungen zu gelangen, wie unten gezeigt:
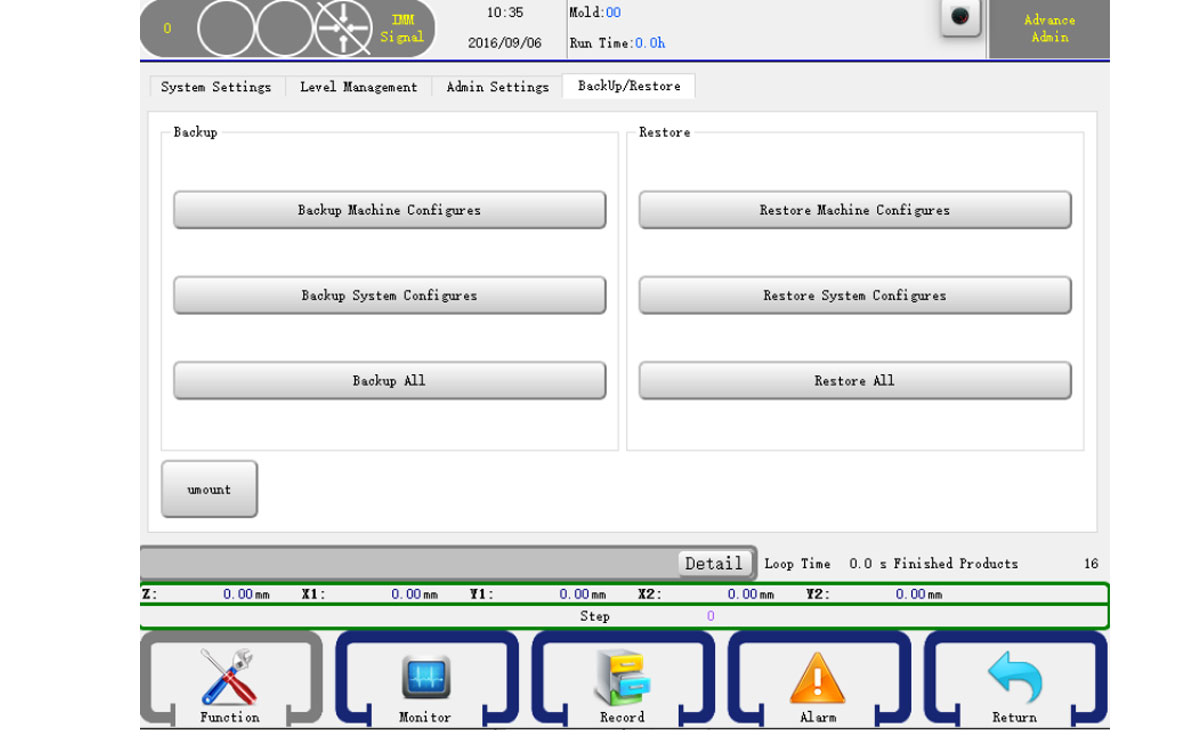
Sie können USB verwenden, um „Maschinenparameter“, „Systemparameter“ und „Formparameter“ zu sichern oder wiederherzustellen, oder alle zum Sichern/Wiederherstellen auswählen.
7.7 Struktureinstellungen
Klicken Sie auf das Element Struktureinstellungen, um zur Seite mit den Struktureinstellungen zu gelangen, wie unten gezeigt:
Mechanische Länge: Die mechanische Länge der Achse.
Abstand/Drehung: Die Distanz einer Servoumdrehung.
Sie können auch andere Parameter wie in 5.4 festlegen. Drücken Sie zur Bestätigung der Änderung die Schaltfläche „Speichern“. WARNUNG: Strukturdefinitionen können zu Maschinenschäden und Verletzungen führen! Wenden Sie sich bitte an den Hersteller.
7.8 Behält
Klicken Sie auf das Element Wartet, um zur Wartungsseite zu gelangen, wie unten gezeigt:
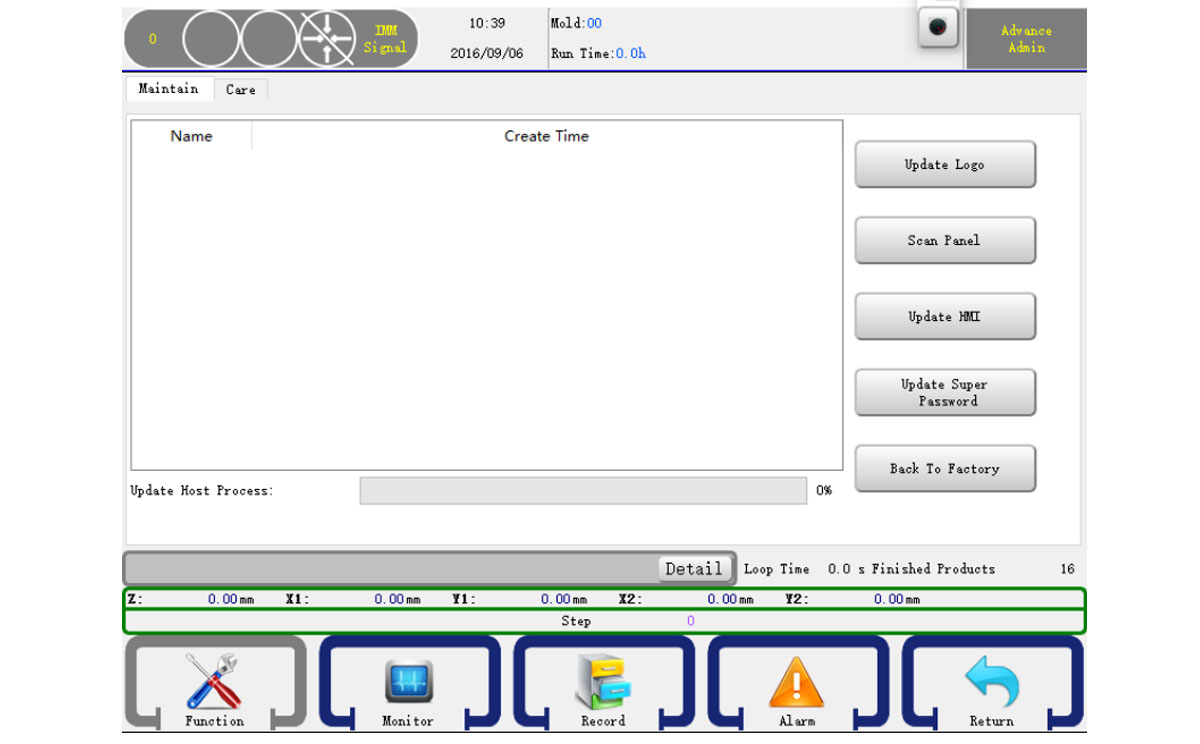
Sie können das System der Systemsteuerung per USB-Stick aktualisieren. Speichern Sie das Systemaktualisierungspaket auf einem USB-Stick. Klicken Sie auf „Aktualisieren“ und warten Sie einen Moment. Die Seite zeigt die Systemversion an, sofern das Systemaktualisierungspaket vom Stick erkannt wird. Falls nicht, klicken Sie erneut auf „Aktualisieren“ oder verwenden Sie einen anderen USB-Stick. Wenn das Systemaktualisierungspaket erkannt wird, klicken Sie auf „Aktualisieren“, um die Systemaktualisierung zu starten. Nach Abschluss wird eine Meldung angezeigt und das System wird neu gestartet. Anschließend können Sie den USB-Stick entfernen.







