
sales06@switek.biz

+86 186 5927 5869

Shopping

Subscrib to Us
sales06@switek.biz
+86 186 5927 5869
Shopping
Subscrib to Us
When you make an order of the robotic arm for your injection molding project, we'll have the robotic arm assembled to be either have the parts dropped from the operator side or non operator side according to your project, but some times you'll have to change the dropping of the parts to the other side of the injection molding machine. In this situation you'll have to reverse the installation of the robotic arm. In this chapter we'll a 3 axis servo injection robot with Panasonic servo motor and driver as an example to demonstrate how to have a reversed installation of the robotic arms.
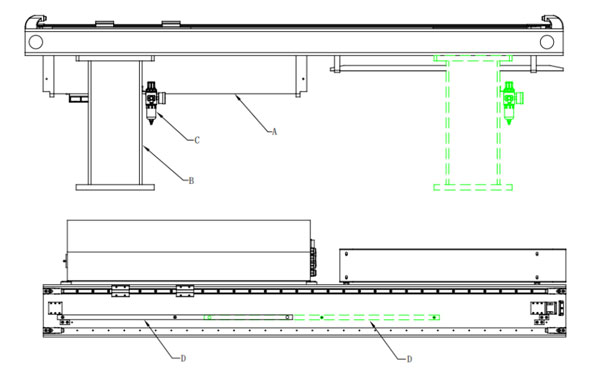
Base Reverse
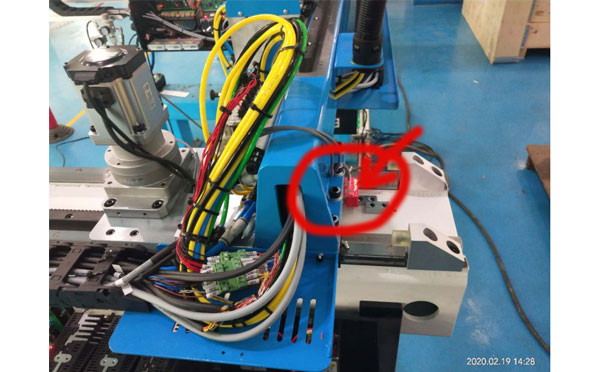
Sensor Reverse 1
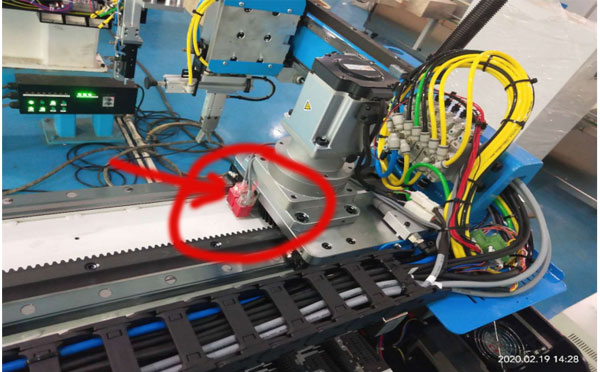
Sensor Reverse 2
Description

Panasonic A6 Parameter Setting
The Modification Process:
Press key "S" → then press key "M" (One time), find Pr0.00 → press key "S" (One time), if the parameter displayed is "1", modify it to "0"; if its "0" then change it to "1" (press up/down key to modify the parameters). After all the settings finished, press the key "S" for 2 seconds → press key "M" (One time) → press key "S" (One time) → press key "UP" (Keep 7 seconds until the screen display "-----") to save the setting.
Repeat the process above to set the parameters of Pr0.12 and have the robot power off and restart again after all the parameter settings finished. The robot would be origined with the new setting.
WARNING: For the safety of your facility, please conduct any modification of the parameters with the instruction of our online service team. Our service engineer will guide you to finish the whole process step by step.

SW6712D-20
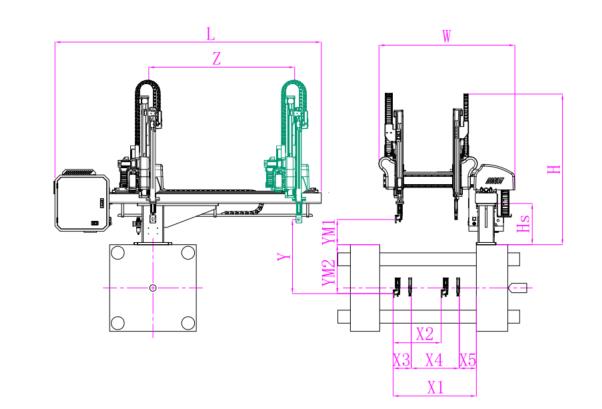
Unit: mm
| X1 | X2 | X3 | X4 | Y | YM1 | YM2 | Z | L | W | H | Payload | 1025 | 605 | 250 | 590 | 1200 | 475 | 725 | 2000 | 3020 | 1610 | 2050 | 8kg |
|---|
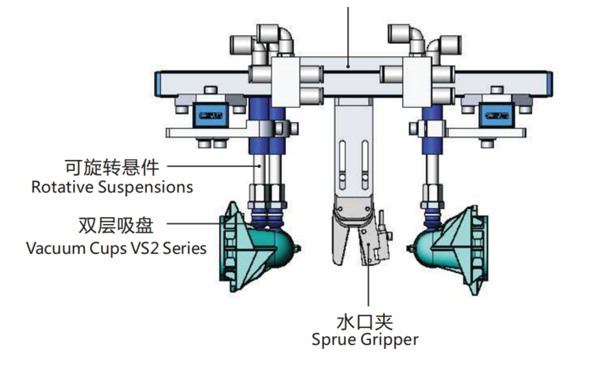
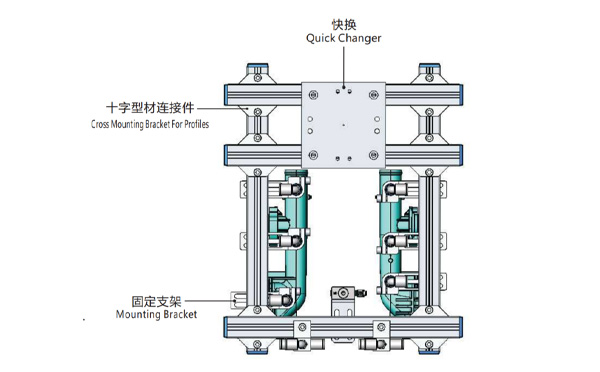
EOAT Assembly Demonstration -- Two Cavities Parts Picking EOAT with Runner Gripping
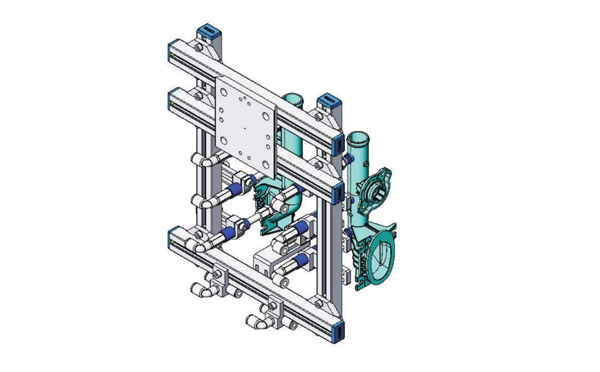
Product Descriptions
Bom List
| Product Name | PN # | Model | Quantity |
|---|---|---|---|
| Quick Changer | 7.Y00175 | QCS-G100 | 1 |
| Sprue Gripper | 8.Y00050 | GR12-12CP | 1 |
| Plugs for Profile | 4.Y00069 | PEP2518 | 10 |
| Cross Mounting Bracket for Profiles | 7.Y00194 | SMBA-2525T | 6 |
| Extruded Profile | 4.Y00455 | PEP2518-1000 | 2 |
| Vacuum Cups VS2 Series | 1.Y03085 | VS2-SA11 | 6 |
| Vacuum Cup Fitting | 7.Y00703 | VM-02-G18 | 6 |
| Rotative Suspensions | 8.Y00061 | VFR1421-G18 | 6 |
| Mounting Bracket | 7.Y00200 | SMBE1-1440T | 6 |
| Connector | 1.Y02510 | APF-M5 | 2 |
| Side Manifold Block | 7.Y00157 | SMB-06M5 | 2 |
| L-Type Threaded HOse Fitting | 1.Y02722 | APL6-01 | 8 |
| Straight Threaded Hose Fitting | 1.Y02725 | APC6-01 | 6 |
What Would be a Preferable Mould Layout Design for a Petri Dish Packing System?
SWITEK is now providing two kinds of solutions for Petri dish packing, one is a packing system with top entry picking robot and the other is a system with a side entry picking robot. The petri dish producer can decide which solutions is better according to the layout design of the workshop.
Traditionally the mould layout design for the Petri dish production will have the top and base integrated into the same mould which could be 2 + 2, 4 + 4 or 8 + 8 with the cover to the top of the mould. The cover on top design is preferable to an automation system of Petri dish packing.
For an automation system of Petri dish packing, the best is to have a turn-key solutions of Petri dish packing of which SWITEK will have the whole system well tested before delivery to ensure that the automation system which you received is a ready to work one to reduce the cost of sytem start up.



