Installationsanleitung für SWITEK Roboterarme für Spritzgießmaschinen – Kapitel 8: E/A-Überwachung und Alarmhistorie
Abstrakt
Die I/O-Schnittstelle dient der Überwachung der Ein-/Ausgangssignale des Roboterarms. Die Bediener können so die Kommunikation zwischen Roboterarm und Spritzgießmaschine überwachen. Sie dient als Referenz zur Fehlerdiagnose am Roboterarm, sei es aufgrund fehlerhafter Verkabelung oder Programmierung. Die I/O-Seite und die Alarmhistorie helfen Ihnen, schnell eine Lösung für jeden Roboterarmfehler zu finden.
8.1 E/A-Monitor
Durch Klicken auf den Menüpunkt „Monitor“ in der Hauptmenüleiste wird die Monitorseite geöffnet, wie unten dargestellt:
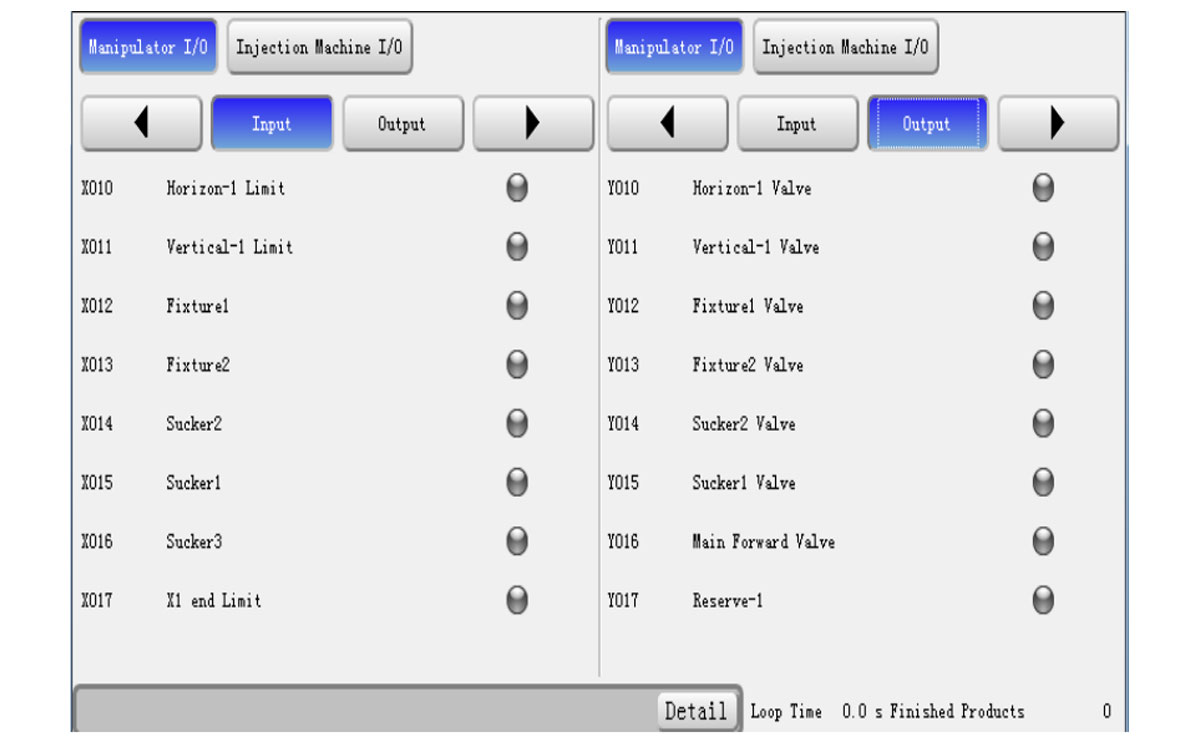
Das Fenster ist in zwei Bereiche unterteilt, wobei die linke und rechte Seite unabhängig voneinander sind. Sie können das Eingangs- und Ausgangssignal gleichzeitig anzeigen. Klicken Sie auf die Schaltfläche „E/A der Spritzgießmaschine“, um den E/A-Signalmonitor der Spritzgießmaschine zu öffnen.
8.2 Alarmverlauf
Durch Klicken auf den Menüpunkt „Alarm“ in der Hauptmenüleiste wird die Alarmhistorie-Seite geöffnet, wie unten dargestellt:
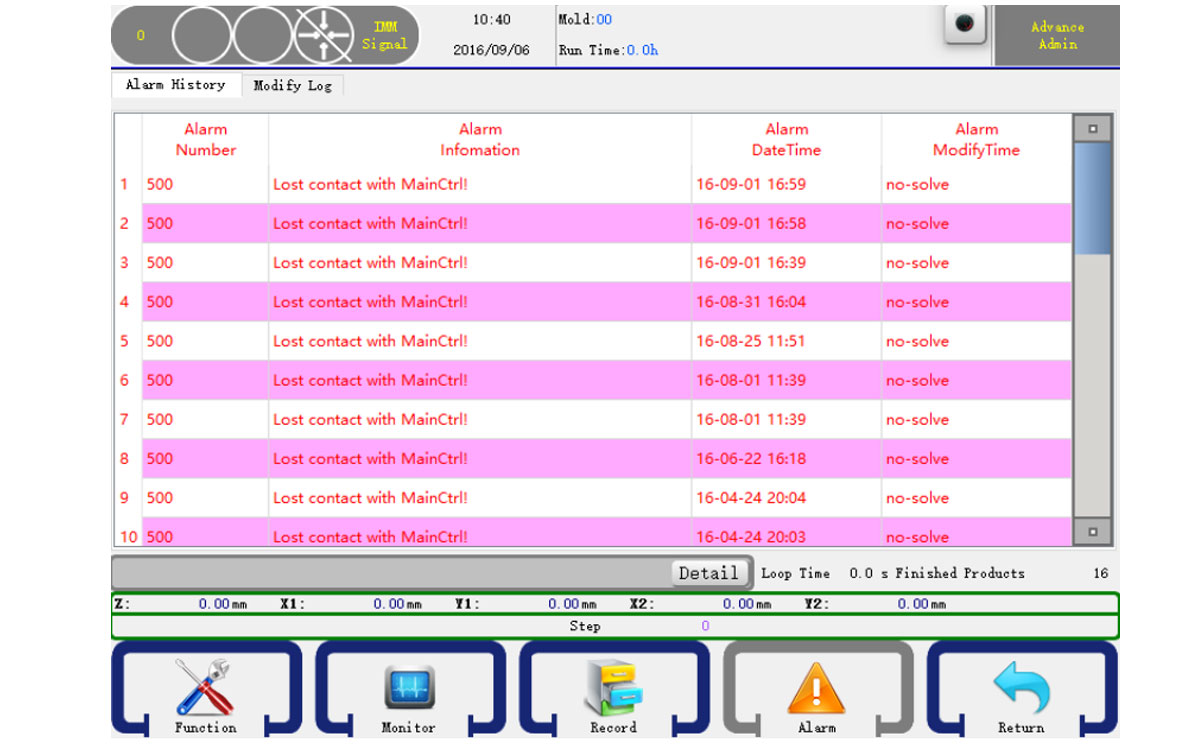
Die letzten 50 Alarmmeldungen werden weiterhin auf dieser Seite angezeigt.
Wenn die Maschine einen Alarm ausgelöst hat, klicken Sie auf die Schaltfläche „Details“.
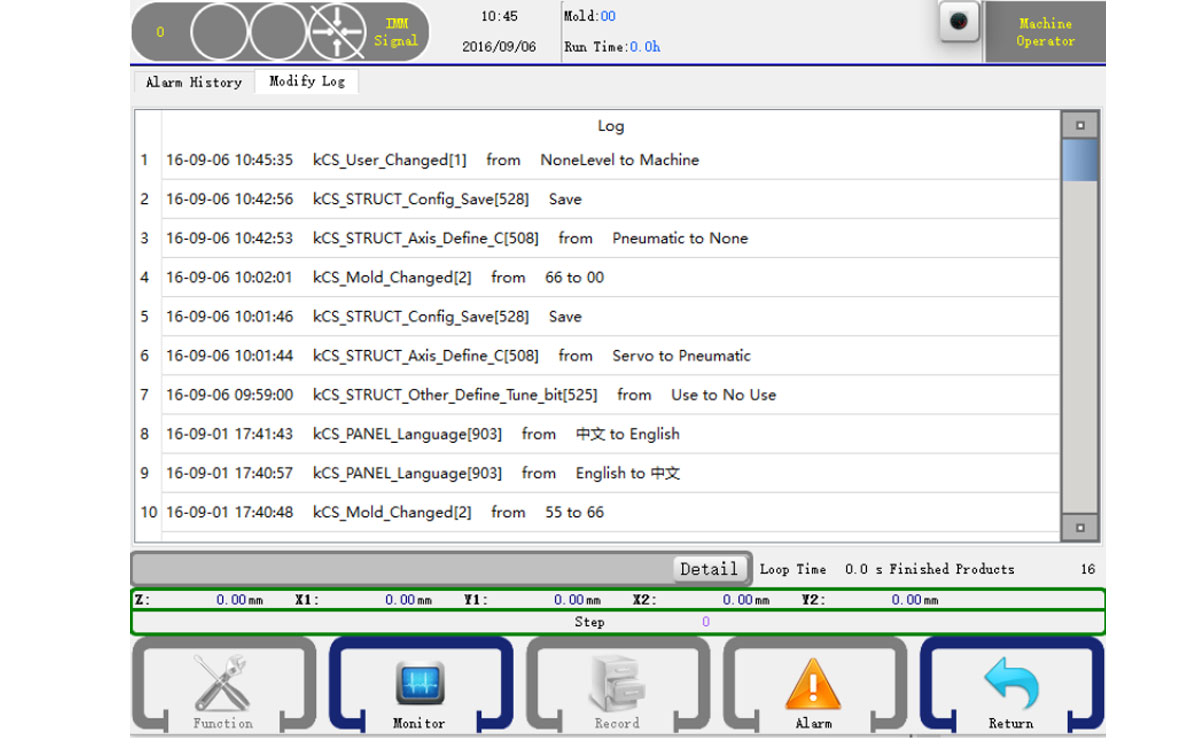
8.3 Protokoll ändern
8.4 Alarminformationen
| Code | Alarminformationen | Alarmgrund |
|---|---|---|
| 1190 | Die obere Hauptgrenze ist nicht beides gleichzeitig aktiv, wenn man von außen nach innen quert. | Die Z-Achse bewegt sich von innerhalb der Sicherheitszone nach außerhalb der Sicherheitszone, die obere Begrenzung des Hauptarms ist deaktiviert. |
| 1192 | Die aktuelle Position ist niedriger als die für die Genehmigungssicherheit erforderliche Position. | Die aktuelle Position ist niedriger als die für die Genehmigungssicherheit erforderliche Position. |
| 1193 | Die aktuelle Position ist größer als die Sicherheitsposition für die Genehmigung. | Die aktuelle Position ist größer als die Sicherheitsposition für die Genehmigung. |
| 1200 | Fehler des Bestätigungssignals bei eingeschalteter Vorrichtung 1 | Signalprüfungsfehler nach dem Einschalten von Leuchte 1 |
| 1201 | Fehler des Bestätigungssignals bei Anschluss 1 AUS | Signalprüfungsfehler nach Abschaltung von Leuchte 1 |
| 1202 | Fehler des Bestätigungssignals bei eingeschalteter Vorrichtung 2 | Signalprüfungsfehler nach dem Einschalten von Leuchte 2 |
| 1203 | Fehler des Bestätigungssignals bei ausgeschalteter Vorrichtung 2 | Signalprüfungsfehler nach Abschaltung von Leuchte 2 |
| 1204 | Bestätigungssignalfehler bei eingeschalteter Leuchte 3 | Signalprüfungsfehler nach dem Einschalten von Leuchte 3 |
| 1205 | Bestätigungssignalfehler bei ausgeschalteter Vorrichtung 3 | Signalprüfungsfehler nach Abschaltung von Leuchte 3 |
| 1206 | Fehler des Bestätigungssignals bei eingeschalteter Leuchte 4 | Signalprüfungsfehler nach dem Einschalten von Leuchte 4 |
| 1207 | Fehler im Bestätigungssignal bei Anschluss 4 AUS | Signalprüfungsfehler nach Abschaltung von Leuchte 4 |
| 1208 | Bestätigungssignalfehler bei eingeschaltetem Sucker1 | Signalprüfungsfehler nach dem Einschalten von Saugnapf 1 |
| 1209 | Fehler des Bestätigungssignals bei Sucker 1 OFF | Signalprüfungsfehler nach dem Ausschalten von Saugnapf 1 |
| 1210 | Fehler des Bestätigungssignals bei eingeschaltetem Sucker 2 | Signalprüfungsfehler nach dem Einschalten von Saugnapf 2 |
| 1211 | Fehler des Bestätigungssignals bei deaktiviertem Saugnapf 2 | Signalprüfungsfehler nach dem Ausschalten von Saugnapf 2 |
| 1306 | Bitte prüfen Sie den Standby-Punkt Anschluss 1. | Gerät 1 muss im Standby-Modus ausgeschaltet sein. Bitte überprüfen Sie dies. |
| 1307 | Bitte prüfen Sie den Standby-Punkt Anschluss 2. | Leuchte 2 muss im Standby-Modus ausgeschaltet sein. Bitte prüfen Sie dies. |
| 1308 | Bitte prüfen Sie den Standby-Punkt Anschluss 3. | Leuchte 3 muss im Standby-Modus ausgeschaltet sein. Bitte prüfen Sie dies. |
| 1309 | Bitte prüfen Sie den Standby-Punkt Anschluss 4. | Leuchte 4 muss im Standby-Modus ausgeschaltet sein. Bitte prüfen Sie dies. |
| 1310 | Bitte überprüfen Sie den Standby-Punkt Sucker 1 | Saugnapf 1 muss im Standby-Modus ausgeschaltet sein. Bitte überprüfen Sie dies. |
| 1311 | Bitte überprüfen Sie den Standby-Punkt Sucker 2. | Saugnapf 2 muss im Standby-Modus ausgeschaltet sein. Bitte überprüfen Sie dies. |
| 1400 | Die Y-Achse erkennt keinen Grenzwert beim Anstieg. | Der Hauptarm befindet sich im Automatikmodus nicht in der oberen Position. Sie sollten ihn manuell in die Ausgangsposition bringen. |
| 1403 | Die Y2-Achse erkennt beim Anstieg keinen Grenzwert. | Der Hilfsarm befindet sich im Automatikmodus nicht in der oberen Position. Sie sollten ihn manuell in die Ausgangsposition bringen. |







