
SWITEK Roboterarme für Spritzgussmaschinen – Installationsanleitung – Kapitel 6: Datensatzverwaltung
Abstrakt
Der SWITEK 3/5-Achsen-Servoroboterarm kann über 100 Programme für verschiedene Formendesigns aufzeichnen. In diesem Kapitel zeigen wir Ihnen, wie Sie ein neues Programm erstellen, ein vorhandenes Programm sichern und das Programm von einem USB-Stick neu laden und wie der Roboterarm auf das Programm reagiert usw.
6.1 Programm erstellen und laden
Klicken Sie im Status „Stopp“ auf die Schaltfläche „Aufzeichnen“ in der Menüleiste, um zur Datensatzverwaltung zu gelangen. Dort können Sie Ihre Programme verwalten. Wie unten gezeigt:
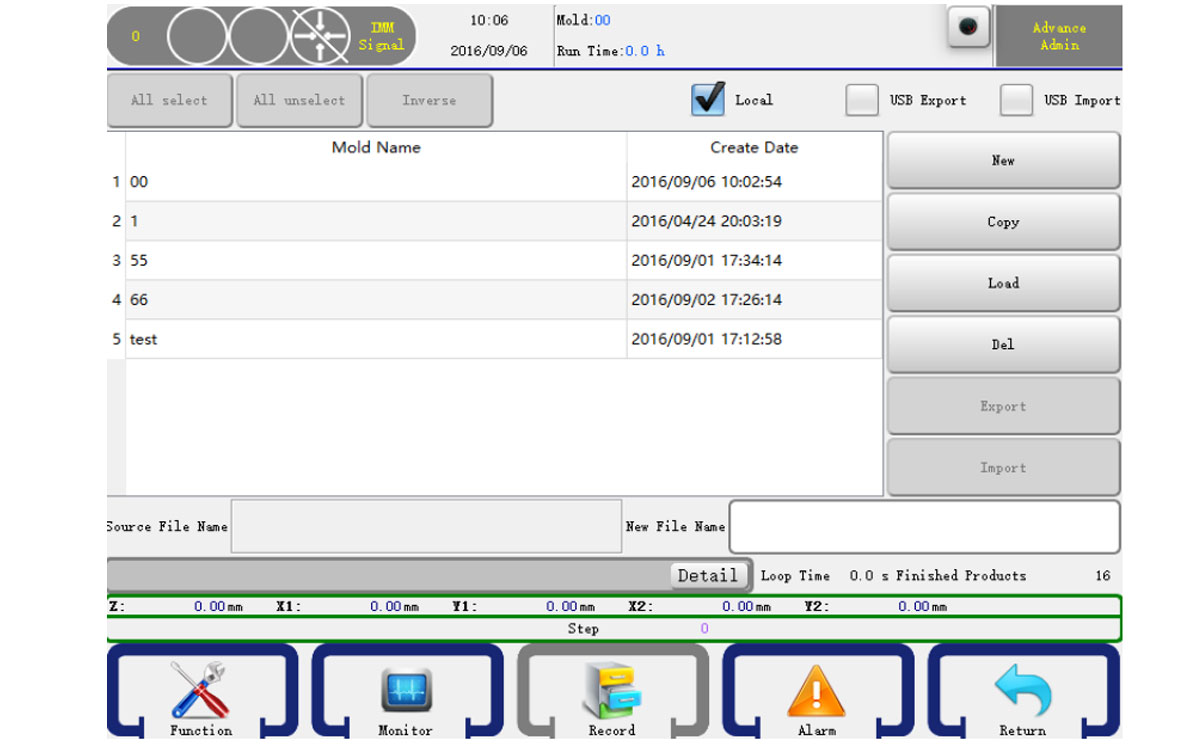
- Programm erstellen: Geben Sie einen Programmnamen in das Feld „Dateiname“ ein und klicken Sie dann auf die Schaltfläche „Neu“, um ein neues Programm zu erstellen.
- Programm kopieren: Geben Sie einen Programmnamen in das Dateinamenfeld ein und klicken Sie dann auf die Schaltfläche „Kopieren“, um ein Programm in ein neues Programm zu kopieren.
- Programm laden: Wählen Sie ein Programm aus und klicken Sie dann auf die Schaltfläche „Laden“, um ein Programm zu laden.
- Programm löschen: Wählen Sie ein Programm aus und klicken Sie anschließend auf die Schaltfläche „Löschen“, um es zu löschen. Das aktuell verwendete Programm kann nicht gelöscht werden.
- Programm exportieren: Wählen Sie ein Programm aus und klicken Sie dann auf die Schaltfläche „Exportieren“, um das Programm auf einem USB-Stick zu sichern.
6.2 Programmanweisungen
Drehen Sie den Knopf nach links, um in den manuellen Modus zu wechseln, und klicken Sie dann auf die Schaltfläche „Teach“ in der Hauptmenüleiste, um den Programmeditor zu öffnen. Wie unten gezeigt:
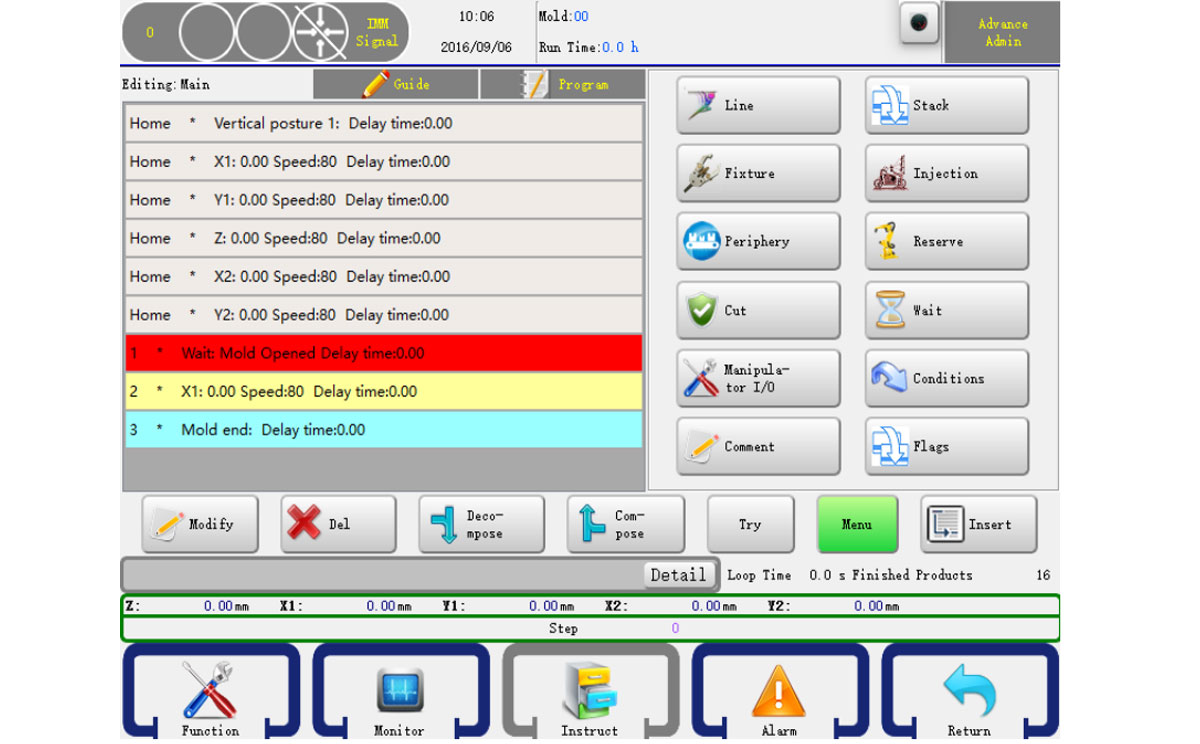
Servoaktion, Stapelaktion, Vorrichtungsaktion, Injektion, Hilfsaktion, Reserveaktion, Prüfaktion, Warteaktion, Serienaktion und Peripherie sind in der Schaltfläche „Anweisung“ enthalten. Klicken Sie auf diese Schaltflächen, um ein Programm zu bearbeiten. Drücken Sie „Anweisung“, um zum Menü zurückzukehren.
Wählen Sie im Anweisungsmodus die zu kombinierenden Aktionen aus und klicken Sie auf „Kombination“. Sie erhalten dann einen Aktionsschritt, der gleichzeitig im Automatikbetrieb ausgeführt wird. Sie können einen kombinierten Schritt auch in mehrere Schritte aufteilen, indem Sie auf „Unterbrechen“ klicken.
6.2.1 Servo-Aktion
Klicken Sie auf die Schaltfläche „Linie“, um in den Servoaktionseditor zu gelangen. Sie können den Status der Achsen X1 (X2), Y1 (Y2), Z und C (Haltung) wie unten gezeigt einstellen:
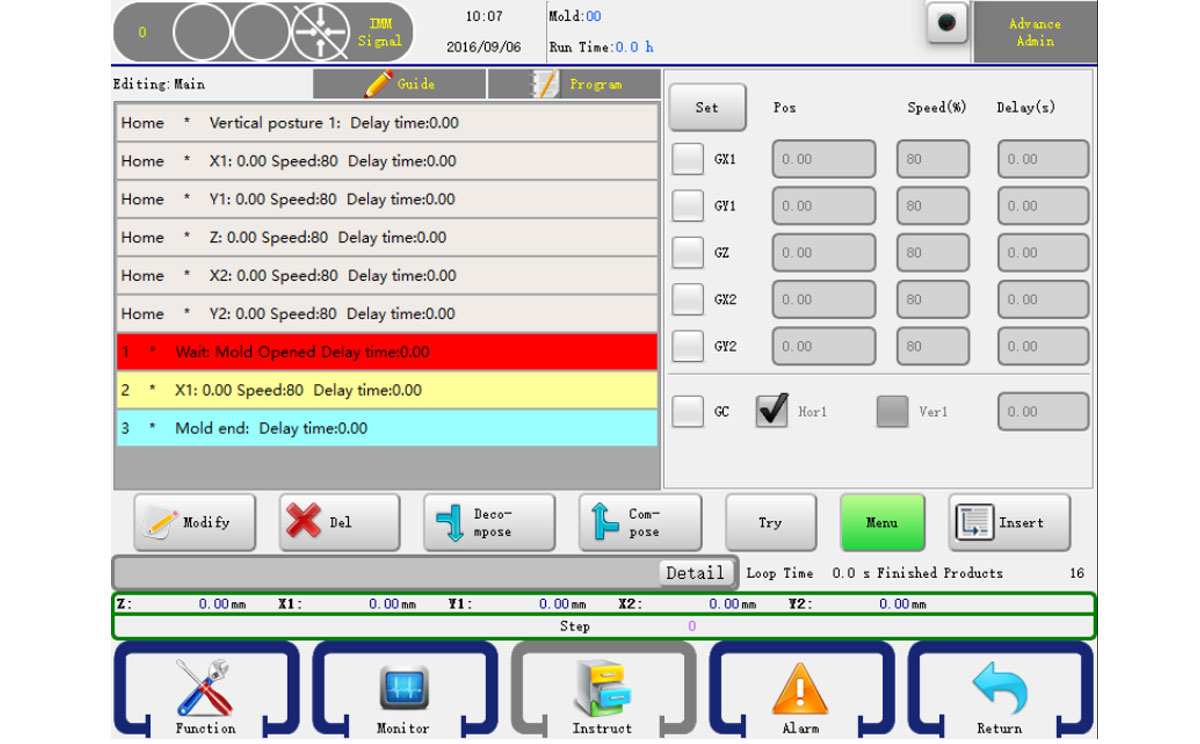
Auf dieser Seite können Sie die Position der X1- (X2-), Y1- (Y2-) und Z-Achse, die Betriebsgeschwindigkeit und die Verzögerungszeit einstellen. Klicken Sie auf das Symbol links. Richten Sie die Achsenparameter ein, wählen Sie die Option aus und klicken Sie auf „Einfügen“, um die entsprechenden Einstellungen zu bestätigen und in die Programmschritte einzufügen.
Es gibt zwei Möglichkeiten, die Achsenposition einzustellen:
- Geben Sie die gewünschte Position in das Editorfeld ein.
- Drücken Sie die Achsentaste auf der Tastatur, um den Arm in die gewünschte Position zu bewegen, und klicken Sie dann auf die Schaltfläche „Festlegen“.
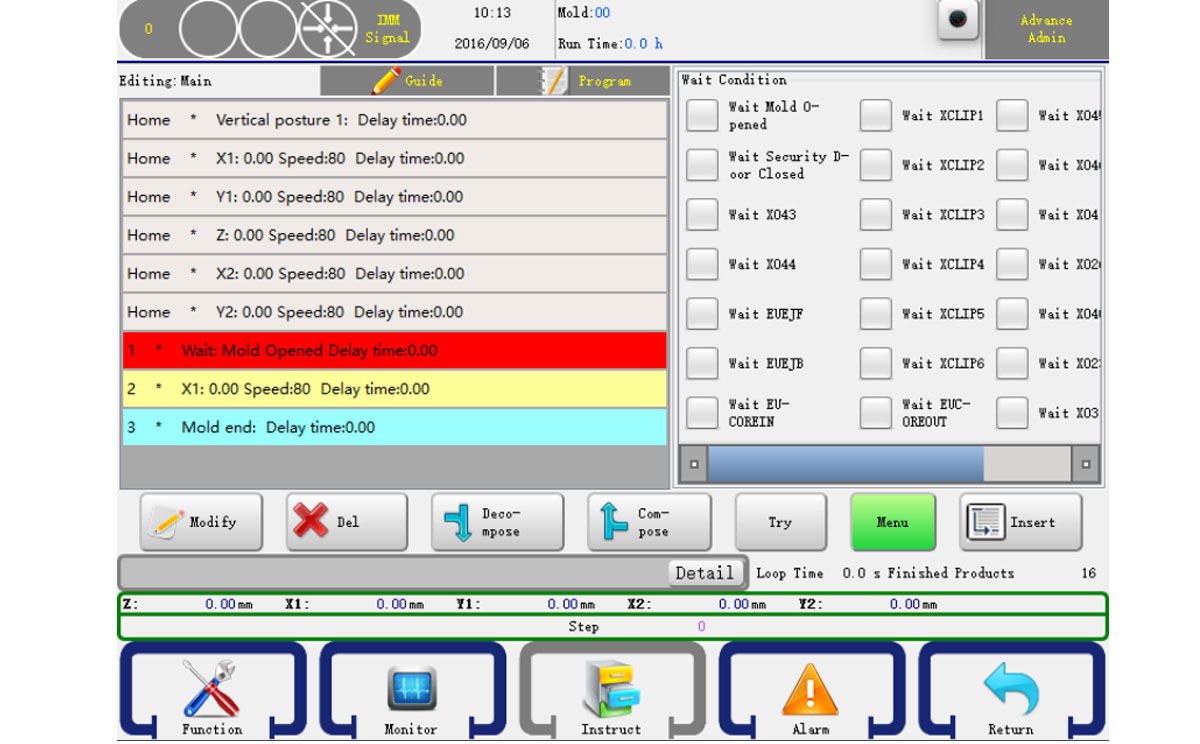
6.2.2 Programmstartpunkt
Die sechs Schritte werden als Ursprungsposition und Position der sechs Achsen angezeigt
Sechs Schritte des Status [Home] oben, die in einem neuen Programm den Standardschrittstatus darstellen, können einfach durch Klicken auf „Bearbeiten“ bearbeitet werden. Dadurch werden die Ausgangsposition, die Betriebsgeschwindigkeit und die Verzögerungszeit der Achsen geändert. Sie können nicht gelöscht werden.
6.2.3 Stapelaktion
Klicken Sie auf die Schaltfläche „Stack“, um in den Stack-Aktionseditor zu gelangen, wie unten gezeigt:
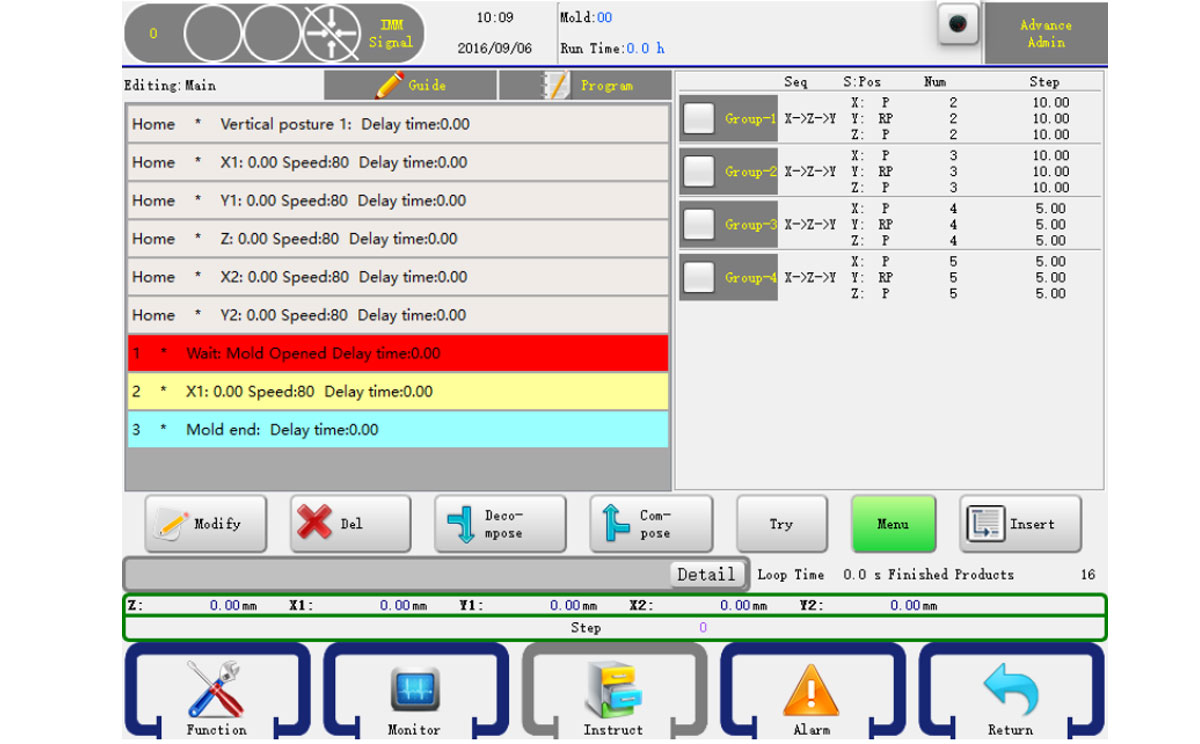
Wählen Sie die linke Seite des Stapels aus, um die Programmgruppe einzufügen, legen Sie die Gruppe fest und klicken Sie anschließend vor dem Stapelschritt auf die Schaltfläche „Einfügen“. Der Roboter stapelt die Produkte im automatischen Betrieb der Reihenfolge nach.
Wenn Sie die Y-Achse zum Stapeln verwenden möchten, sollten Sie sicherstellen, dass der Stapel eingefügt wird, bevor die Y-Achse abgesenkt wird.
6.2.4 Vorrichtungsaktion
Klicken Sie auf die Schaltfläche „Fixture“, um zum Fixture- und Sucker-Action-Editor zu gelangen, wie unten gezeigt:
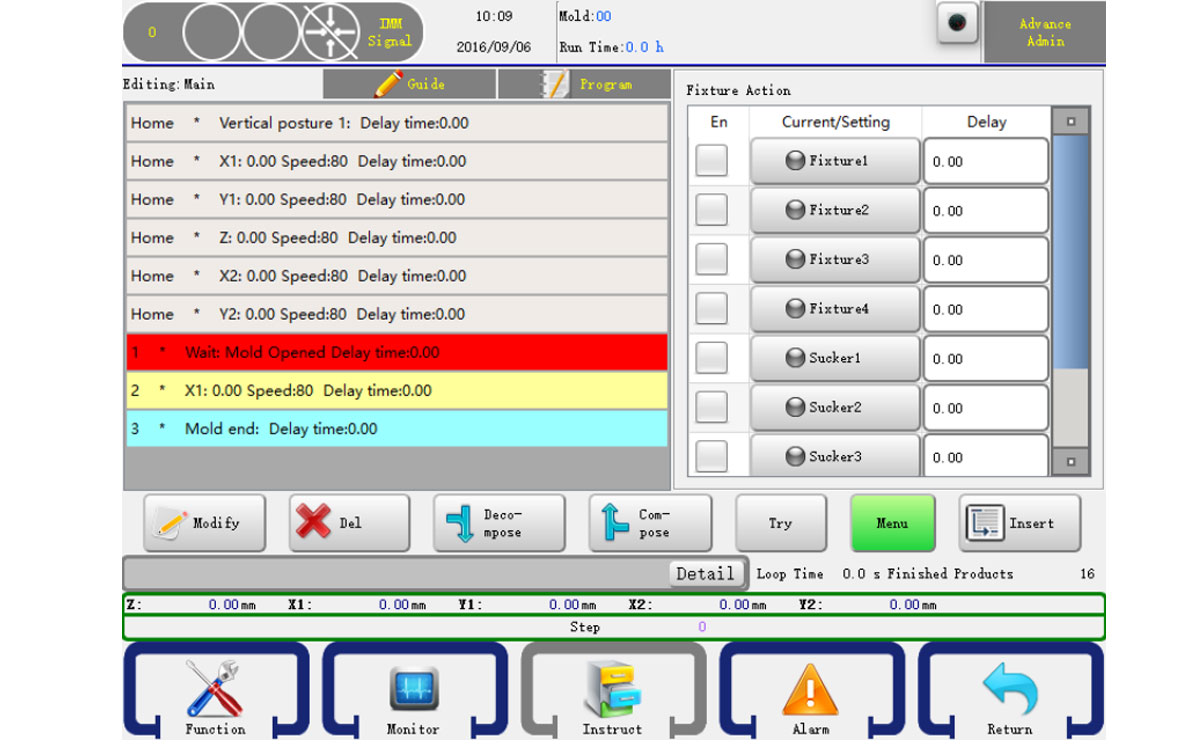
Der Controller kann vier Vorrichtungen und zwei Saugnapfaktionen einstellen. Klicken Sie auf die zu steuernde Schaltfläche. Die Anzeige wird bei Ausgabe rot. Klicken Sie dann links, sodass die Anzeige rot wird. Klicken Sie auf „Einfügen“, um den Aktionsschritt in die vorderen Schritte des Auswahlverfahrens einzufügen.
Nachdem Sie die Vorrichtung und die Saugnapf-Aktion eingefügt haben, fügen Sie unbedingt die Prüf-Aktion ein, da das Programm sonst deren Bestätigungssignal nicht prüft. Wenn Sie das Signal nicht bestätigen, benötigen Sie die Prüf-Aktion nicht. Zum Schutz der Maschine ist die Prüf-Aktion jedoch trotzdem empfehlenswert.
6.2.5 IMM-Aktion
Klicken Sie auf die Schaltfläche „Injektion“, um zum Injektionsaktionseditor zu gelangen, wie unten gezeigt:
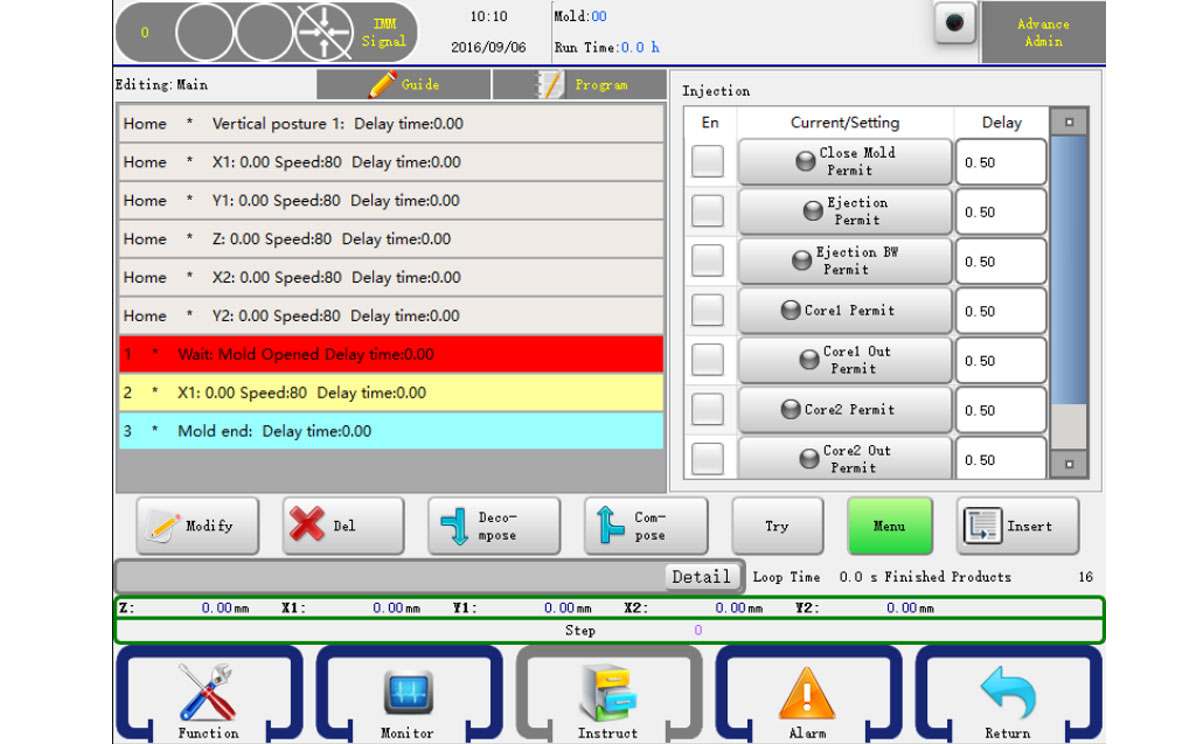
Die Operation ist die gleiche wie bei der Programmvorrichtungsaktion. Siehe 6.2.4.
6.2.6 Hilfsaktion
Klicken Sie auf die Schaltfläche „Hilfsmittel“, um zum Peripherieaktionseditor zu gelangen. In diesem Editor finden Sie Injektor-, Förderband-, Reservepunkt- und Stapelaktionen, wie unten dargestellt:
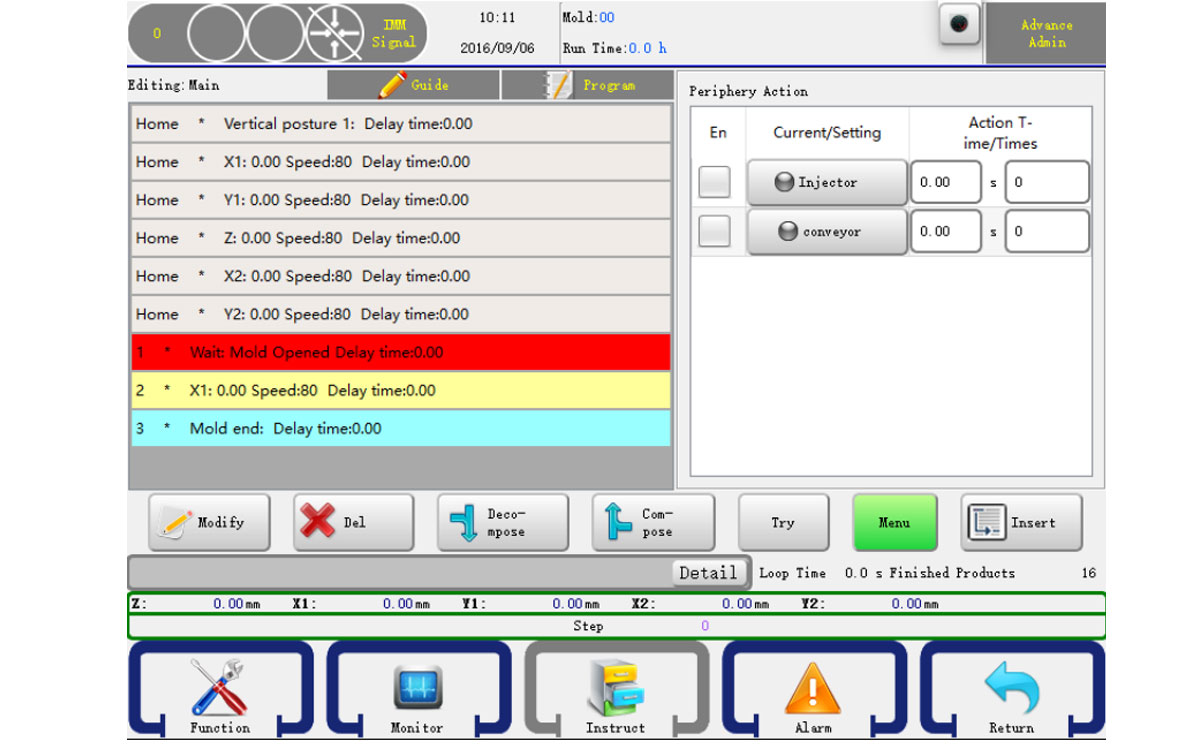
Die Funktionsweise entspricht der Programm-Fixture-Aktion. Siehe 6.2.4
Zeiten: Gibt an, wie lange die Aktion in einem Zyklus ausgeführt werden soll.
Verzögerung: Legt fest, wie viele Formen im Automatikmodus ausgegeben werden sollen, z. B. alle ein oder zwei Formen usw.
6.2.7 Reserveaktion
Klicken Sie auf die Schaltfläche „Reservieren“, um zum Aktionseditor zu gelangen. Wie unten gezeigt:
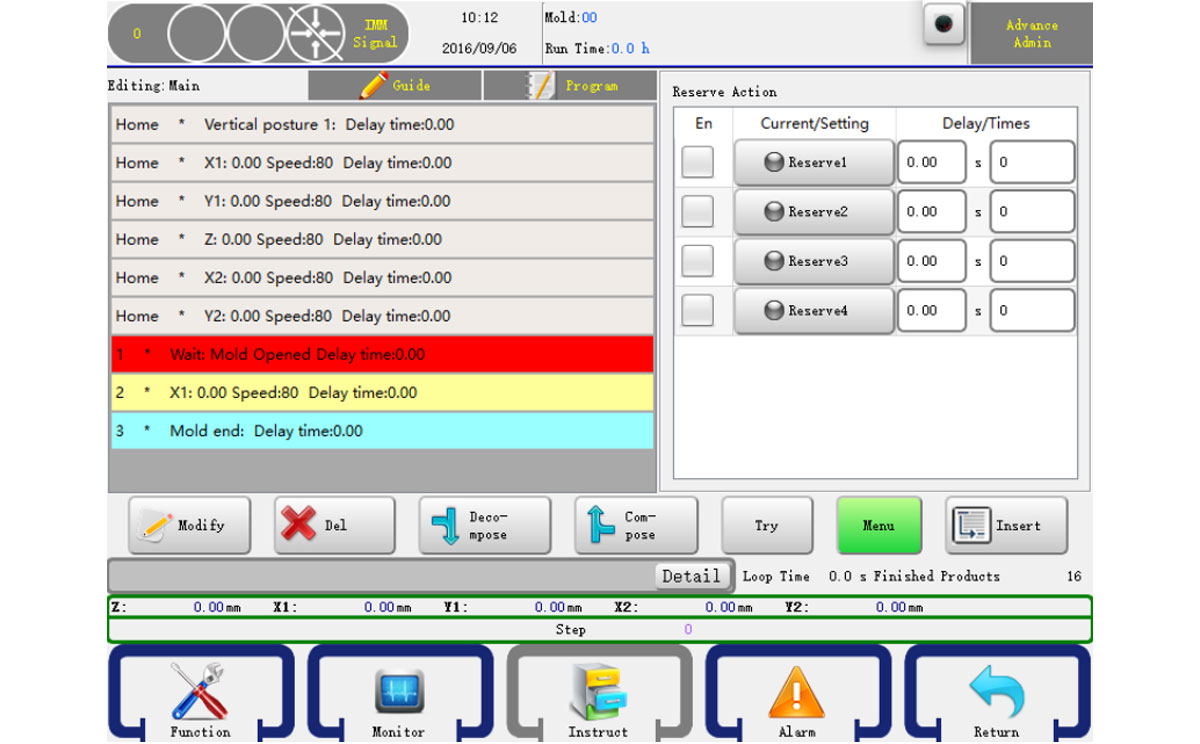
Das System verfügt über vier Reserven.
Zeiten: Gibt an, wie lange die Aktion in einem Zyklus ausgeführt werden soll.
Verzögerung: Legt fest, wie viele Formen automatisch ausgegeben werden sollen, z. B. alle ein oder zwei Sekunden usw.
6.2.8 Warteaktion
Klicken Sie auf die Schaltfläche „Warten“, um den Warteaktionseditor zu öffnen. Bei dieser Aktion stoppt das Programm, bevor das zu wartende Eingangssignal aktiviert wird. Der Editor sieht wie folgt aus:
Markieren Sie einfach das Signal, auf das Sie warten möchten, und klicken Sie auf die Schaltfläche „Einfügen“, um Ihre Änderung zu bestätigen.
6.2.9 Kommentar
Klicken Sie auf die Schaltfläche „Kommentar“, um zum Kommentar-Editor zu gelangen. Dort können Sie Kommentare zum Programm hinterlassen.

Sie können die Informationen über die virtuelle Tastatur eingeben.

6.2.10 Bedingungen
Sie können in Ihrem Programm auch Bedingungen festlegen:
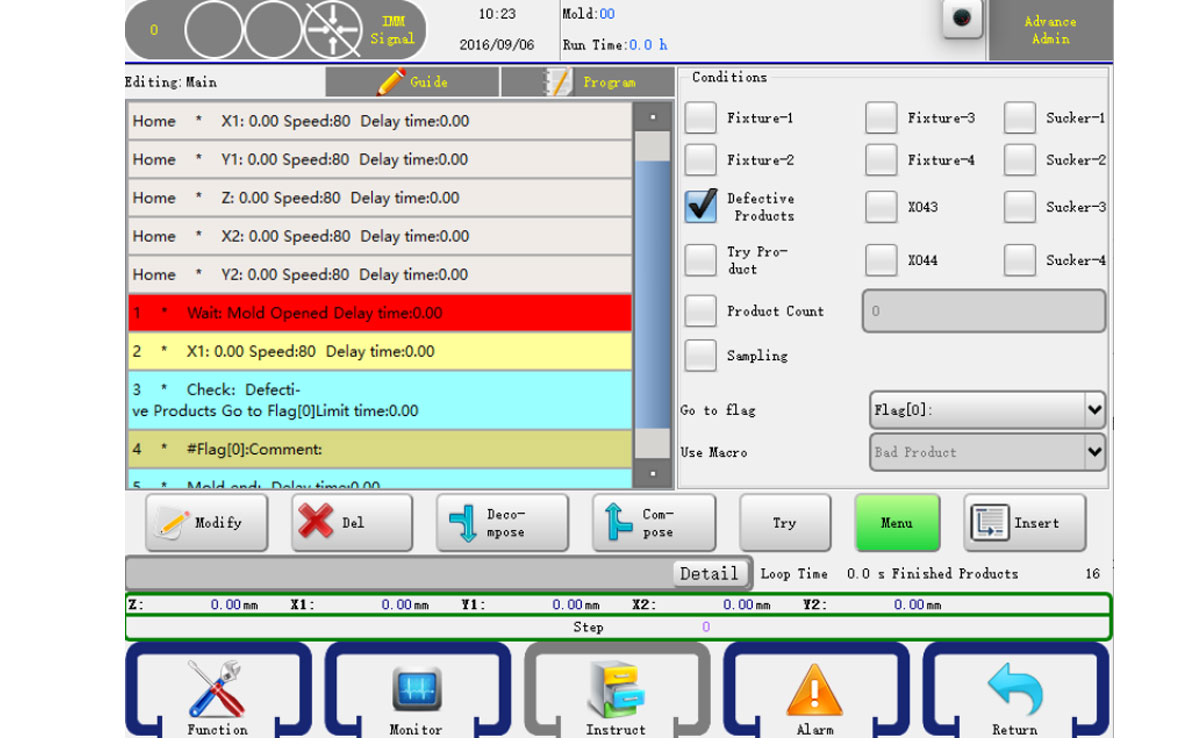
Achtung: Das Programm muss einen Kommentar haben, um die Bedingungen zu verwenden.
6.2.11 Programm ändern
Wählen Sie den zu ändernden Schritt aus und klicken Sie anschließend auf die Schaltfläche „Ändern“. Der Änderungsdialog wird wie unten gezeigt geöffnet:
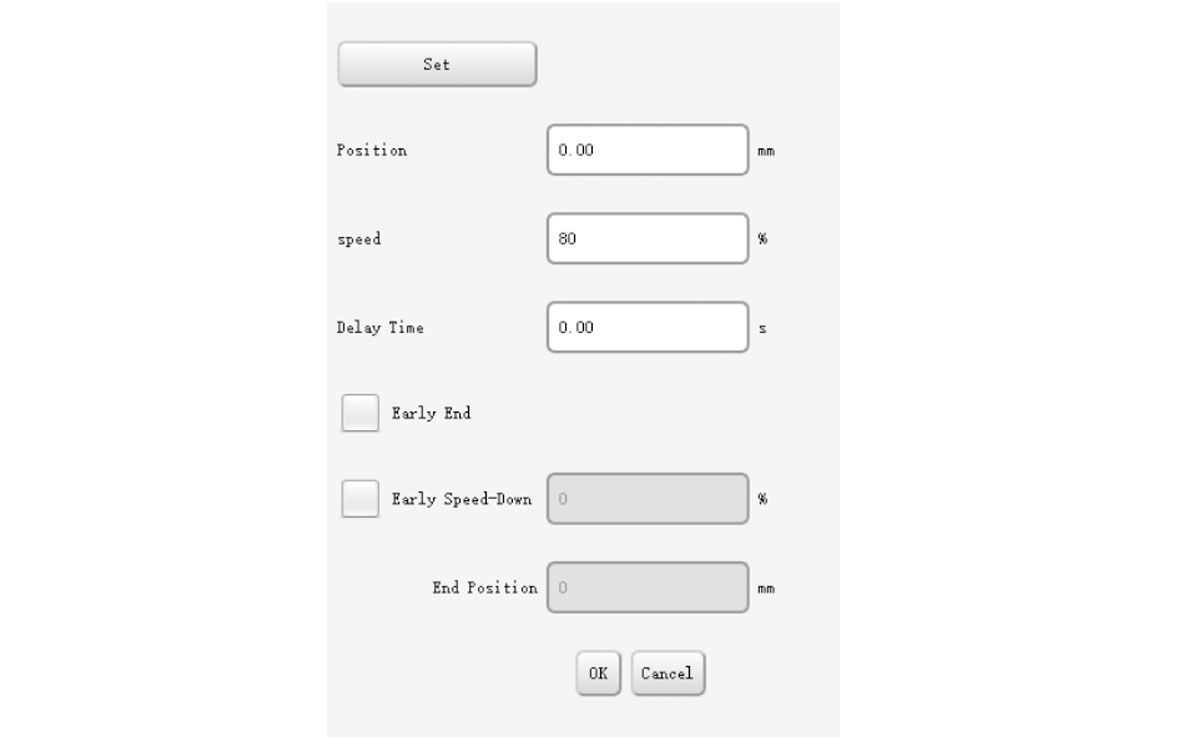
Sie können die Aktionskonfiguration ändern und zur Bestätigung auf „OK“ klicken.
6.3 Demo
Die folgende Vorgehensweise hilft Ihnen beim Erlernen und Üben der Roboterprogrammierung. Im eigentlichen Roboterprogramm stellen Sie je nach Ihrer tatsächlichen Situation die Servoachsenposition ein und legen die richtige Sequenz mit der Spritzgießmaschine fest.
6.3.1 Befehl
Beim Entnehmen der Produkte und Zuführen des Endstücks bleibt der Roboter oben auf der Spritzgießmaschine und wartet auf das Signal zum Öffnen der Form. Sobald die Spritzgießmaschine die Form öffnet, senken sich die Arme ab und nehmen die Produkte und den Angusskanal auf. Anschließend lässt er den Angusskanal zum Zerkleinerer fallen und legt das Produkt auf das Förderband, das sich bei jedem Formzyklus bewegt.
6.3.2 Aktionen
> In den Automatikmodus wechseln.
> Die Arme fahren zum Startpunkt und warten auf das Signal zum Öffnen der Form.
> Saugen 1 für Produkt, Vorrichtung 1 für Angusskanal.
> Die Arme fahren aus der Spritzgießmaschine heraus und aktivieren das Signal zum Schließen der Form.
> Angusskanal freigeben.
> Das Produkt auf das Förderband legen und 3 Sekunden lang in Bewegung setzen.
> Die Arme kehren in die Warteposition zurück.
6.3.3 Programm
Home X1: 0,0 Geschwindigkeit: 30 Verzögerungszeit: 0,00
Home Y1: 0,0 Geschwindigkeit: 30 Verzögerungszeit: 0,00
Home Z: 0,0 Geschwindigkeit: 30 Verzögerungszeit: 0,00
Home X2: 0,0 Geschwindigkeit: 30 Verzögerungszeit: 0,00
Home Y2: 0,0 Geschwindigkeit: 30 Verzögerungszeit: 0,00
Home Vertikale Haltung Verzögerungszeit: 0,00
- Wait: Mold Opened Delay time: 0.00
- Y1: 850.0 Speed: 90 Delay time: 0.00
- X1: 400.0 Speed: 90 Delay time: 0.00
- Y2: 850.0 Speed: 90 Delay time: 0.00
- X2: 400.0 Speed: 90 Delay time: 0.00
- Sucker1 On Delay time: 0.00
- X1: 0.0 Speed: 90 Delay time: 0.35
- Y1: 0.0 Speed: 90 Delay time: 0.00
- X2: 0.0 Speed: 90 Delay time: 0.35
- Y2: 0.0 Speed: 90 Delay time: 0.00
- Sucker1 Begin-cut
- Lock Mold On Delay time: 0.00
- Horizontal posture Delay time: 0.00
- Z: 1000.0 Speed: 90 Delay time:0.00
- Y1: 800.0 Speed: 90 Delay time: 0.00
- Y2: 800.0 Speed: 90 Delay time: 0.00
- Sucker1 OFF Delay time:0.00
- Y1: 0.0 Speed: 90 Delay time: 0.25
- Y2: 0.0 Speed: 90 Delay time:0.25
- Conveyor On Times: 1 Action time: 3.00
- Z: 0.0 Speed: 90 Delay time: 0.00
- Vertical posture Delay time: 0.00
- Mold End Delay time:0.00







