
SWITEK Roboterarme für Spritzgussmaschinen – Installationsanleitung – Kapitel 5: Betrieb
Abstrakt
Manuell, Stopp und Automatik sind drei Betriebszustände des Roboterarms für Spritzgießmaschinen, die der Bediener über den Schalter oben links am Handregler auswählen kann. In diesem Kapitel erfahren Sie, wie Sie den Roboterarm bedienen und programmieren, testen, programmieren, parametrieren und automatisch laufen lassen.
5.1 Zurückgegebene Ursprungsposition
Damit der Roboter nach dem Einschalten automatisch und korrekt läuft, ist eine Rückkehr zur Ausgangsposition (ORI) erforderlich. Der Roboter muss für jede Achse in die Ausgangsposition zurückkehren und Sauger und Vorrichtung in die geschlossene Position zurückführen.
Drücken Sie im Stoppmodus einmal die Home-Taste und anschließend die Start-Taste, um mit den Achsen Y1 (Y2), X1 (X2) und Z in der Reihenfolge zur Ausgangsposition zurückzukehren. Gleichzeitig wird ein Fenster angezeigt, das Sie daran erinnert, dass der OPR-Vorgang fortgesetzt wird und alle elektrischen Achsen auf 0 zurückgesetzt werden.
Wenn alle Achsen, Sauger und Vorrichtungen in die Ausgangsposition zurückkehren, wird oben rechts auf dem Bildschirm ein Symbol angezeigt.  Sie können den automatischen und manuellen Modus verwenden.
Sie können den automatischen und manuellen Modus verwenden.
Während des Betriebs ist weder eine manuelle noch eine automatische Bedienung möglich und es können keine Einstellungen geändert werden. Drücken Sie im Notfall die Stopp- oder Not-Aus-Taste, um den Betrieb zu stoppen.
5.2 Manueller Betrieb
Drehen Sie den Knopf nach links, der Roboter wechselt in den Manuellen Status, wie unten gezeigt:
5.2.1 Achsenaktion
Benutzer können die Arme nicht über den festgelegten Ursprung hinaus bewegen, aber pneumatische Ventile bedienen.
 | Pneumatische Steuerung: Hauptarm nach oben durch einmaliges Drücken Elektrische Steuerung: Hauptarm nach oben gedrückt halten. Die Bewegung wird gestoppt, wenn die Taste losgelassen wird. |
 | Pneumatische Steuerung: Hauptarm nach unten durch einmaliges Drücken. Elektrische Steuerung:Hauptarm nach unten gedrückt halten. Die Bewegung wird gestoppt, wenn die Taste losgelassen wird. |
 | Pneumatische Steuerung: Schraubstockarm durch einmaliges Drücken nach oben heben. Elektrische Steuerung:Schraubstockarm gedrückt halten. Die Bewegung wird gestoppt, wenn die Taste losgelassen wird. |
 | Pneumatische Steuerung: Schraubstockarm nach unten durch einmaliges Drücken. Elektrische Steuerung:Schraubstockarm nach unten gedrückt halten. Die Bewegung wird gestoppt, wenn die Taste losgelassen wird. |
 | Pneumatische Steuerung: Hauptarm nach hinten durch einmaliges Drücken. Elektrische Steuerung:Hauptarm nach hinten gedrückt halten. Die Bewegung wird gestoppt, wenn die Taste losgelassen wird. |
 | Pneumatische Steuerung: Hauptarm nach vorne durch einmaliges Drücken. Elektrische Steuerung:Hauptarm nach vorne gedrückt halten. Die Bewegung wird gestoppt, wenn die Taste losgelassen wird. |
 | Pneumatische Steuerung: Unterarm nach hinten durch einmaliges Drücken. Elektrische Steuerung:Unterarm nach hinten gedrückt halten. Die Bewegung wird gestoppt, wenn die Taste losgelassen wird. |
 | Pneumatische Steuerung: Subarm nach vorne drücken, einmal drücken. Elektrische Steuerung:Unterarm nach vorne gedrückt halten. Die Bewegung wird gestoppt, wenn die Taste losgelassen wird. |
 | Pneumatische Steuerung: Die Haltung wird durch einmaliges Drücken in die vertikale Position gedreht. Elektrische Steuerung:Die Haltung bewegt sich beim Drücken in die vertikale Position. Die Bewegung stoppt, wenn der Druck losgelassen wird. |
 | Pneumatische Steuerung: Die Haltung des Roboterarms wird durch einmaliges Drücken in die horizontale Position gedreht. Elektrische Steuerung:Die Haltung des Roboterarms wird durch Drücken in die horizontale Position gebracht. Die Bewegung wird gestoppt, wenn der Druck losgelassen wird. |
 | Traverse In |
 | Auswärts traversieren |
5.2.2 Vorrichtungsaktion
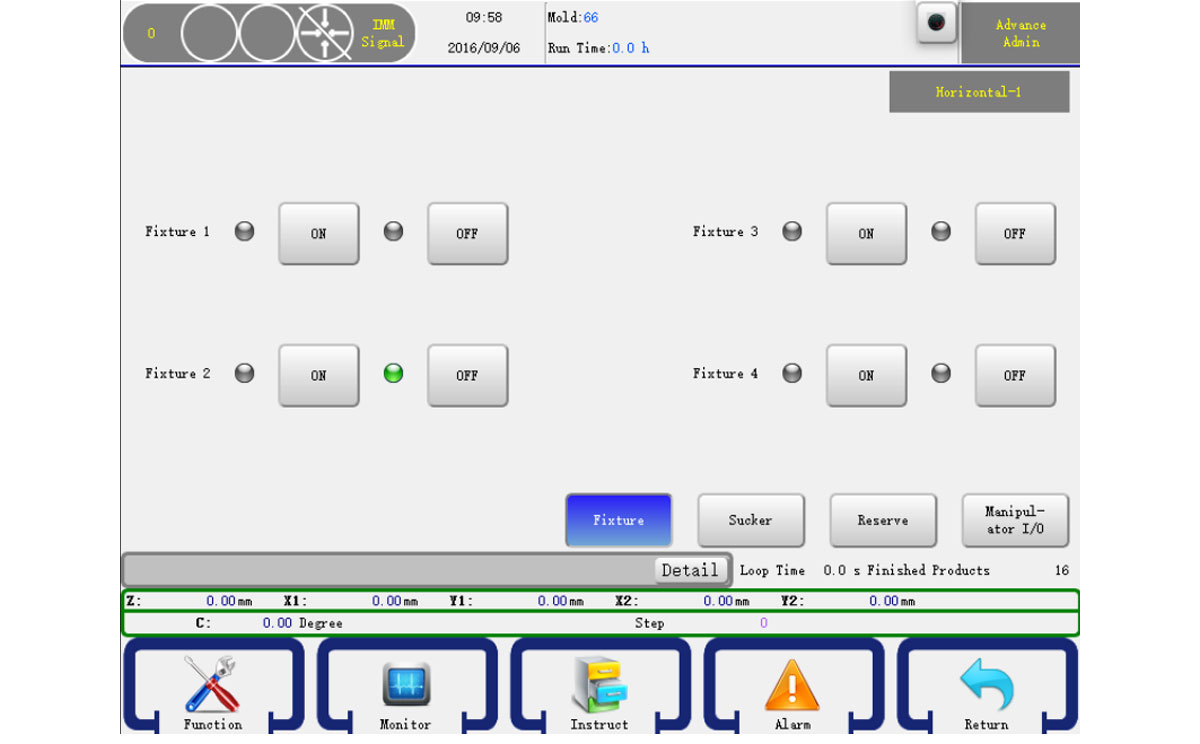
Klicken Sie auf der Handbuchseite unten rechts auf die Schaltfläche Fixture, um zur Handbuchseite mit den Fixtures zu gelangen, wie unten gezeigt:
Es gibt vier Leuchten. Drücken Sie die Taste EIN, um sie einzuschalten, und die Taste AUS, um sie auszuschalten.
Achtung: Das Eingangssignal wird rot und das Ausgangssignal grün angezeigt. Die Eingangs- oder Ausgangsanzeige ist aus, wenn kein Signal vorhanden ist.
5.2.3 Saugnapfwirkung
Klicken Sie auf der Handbuchseite unten rechts auf die Schaltfläche [Sucker], um zur Handbuchseite zu gelangen, wie unten gezeigt:
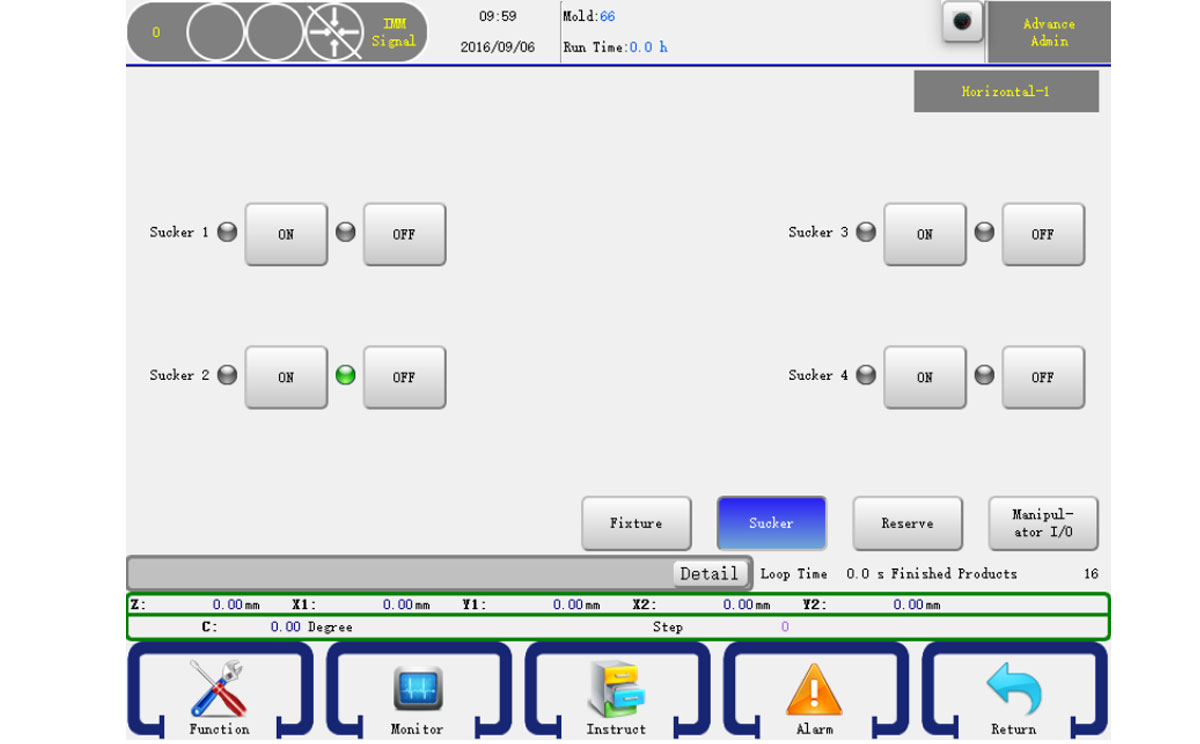
Es gibt vier Saugnäpfe. Drücken Sie die Taste EIN, um sie einzuschalten, und die Taste AUS, um sie auszuschalten.
Achtung: Das Eingangssignal wird rot und das Ausgangssignal grün angezeigt. Die Eingangs- oder Ausgangsanzeige ist aus, wenn kein Signal vorhanden ist.
5.2.4 Hilfsaktion
Klicken Sie auf der Handbuchseite unten rechts auf die Schaltfläche Andere, um zur anderen Handbuchseite zu gelangen, wie unten gezeigt:
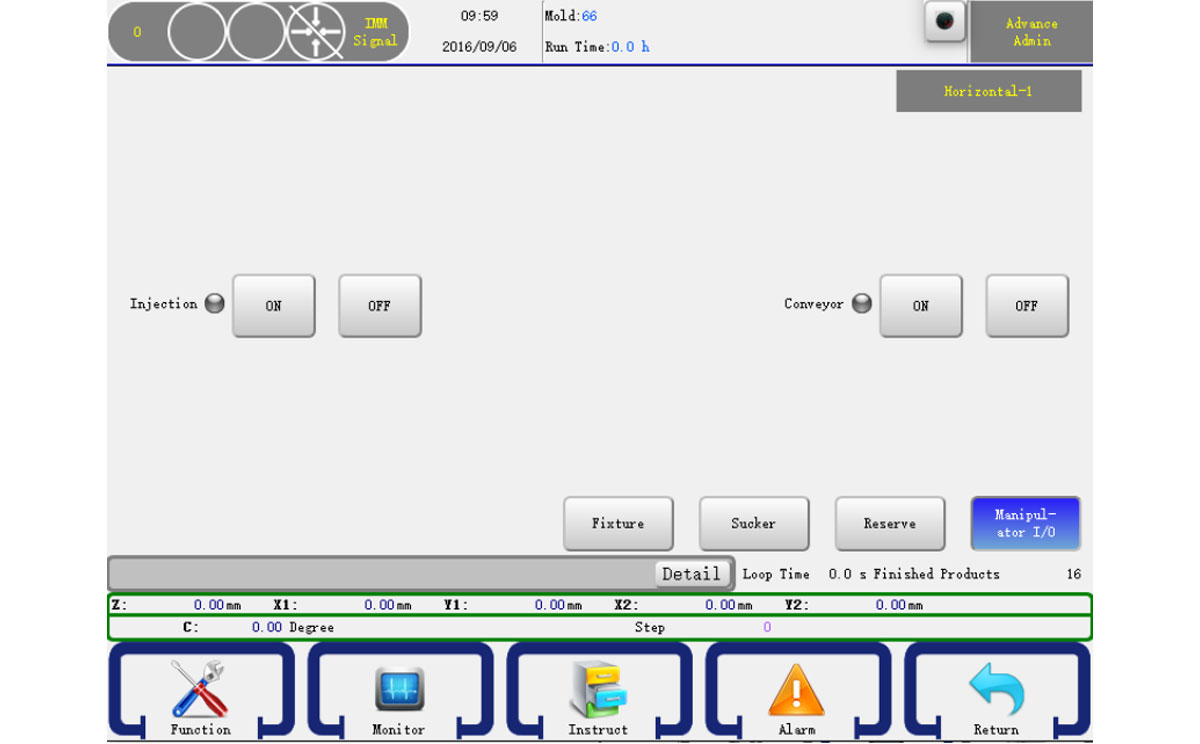
Die Bedienung ist die gleiche wie bei Fixture
5.2.5 Reserveaktion
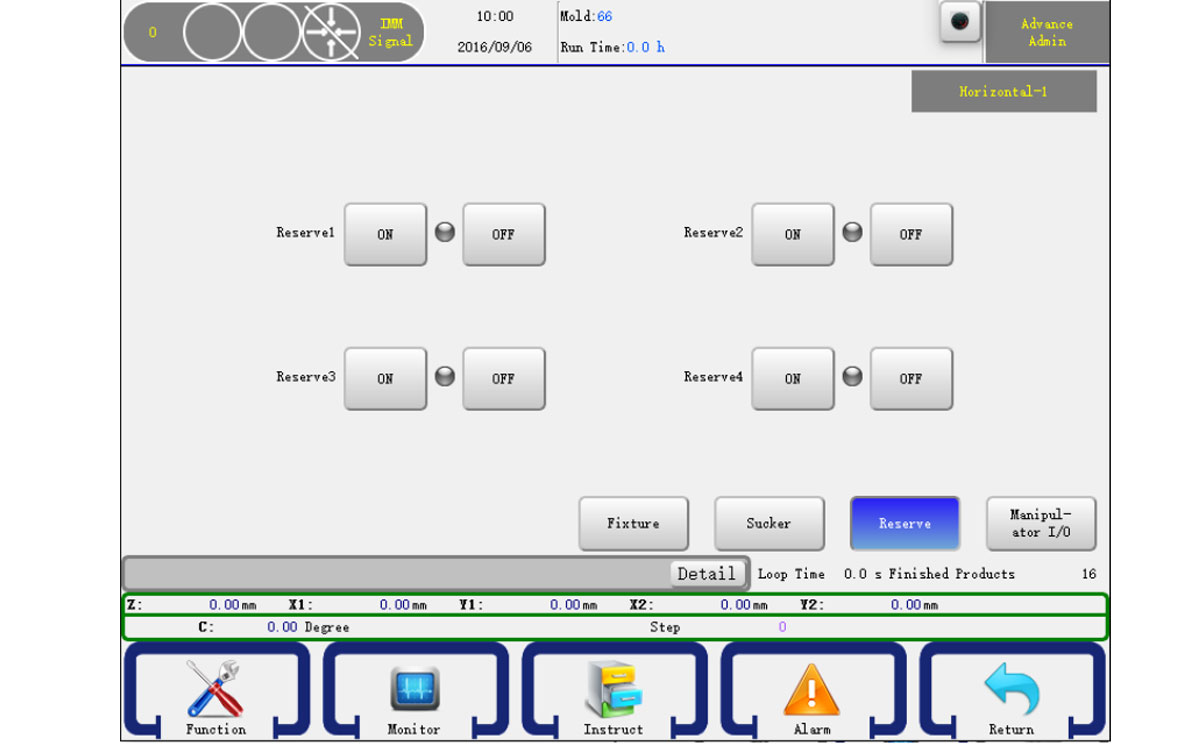
Die Bedienung ist die gleiche wie bei Fixture
5.3 Auto Mode
5.3.1 Automatischen Betriebsstatus überwachen
Drehen Sie den Knopf nach rechts, um zur Autostart-Seite zu gelangen. Der Roboter wechselt in den Status Autostart bereit. Drücken Sie in diesem Status die Starttaste, um den Roboter in den Status Autostart zu wechseln. Sie können den Betriebsstatus wie unten gezeigt überwachen.
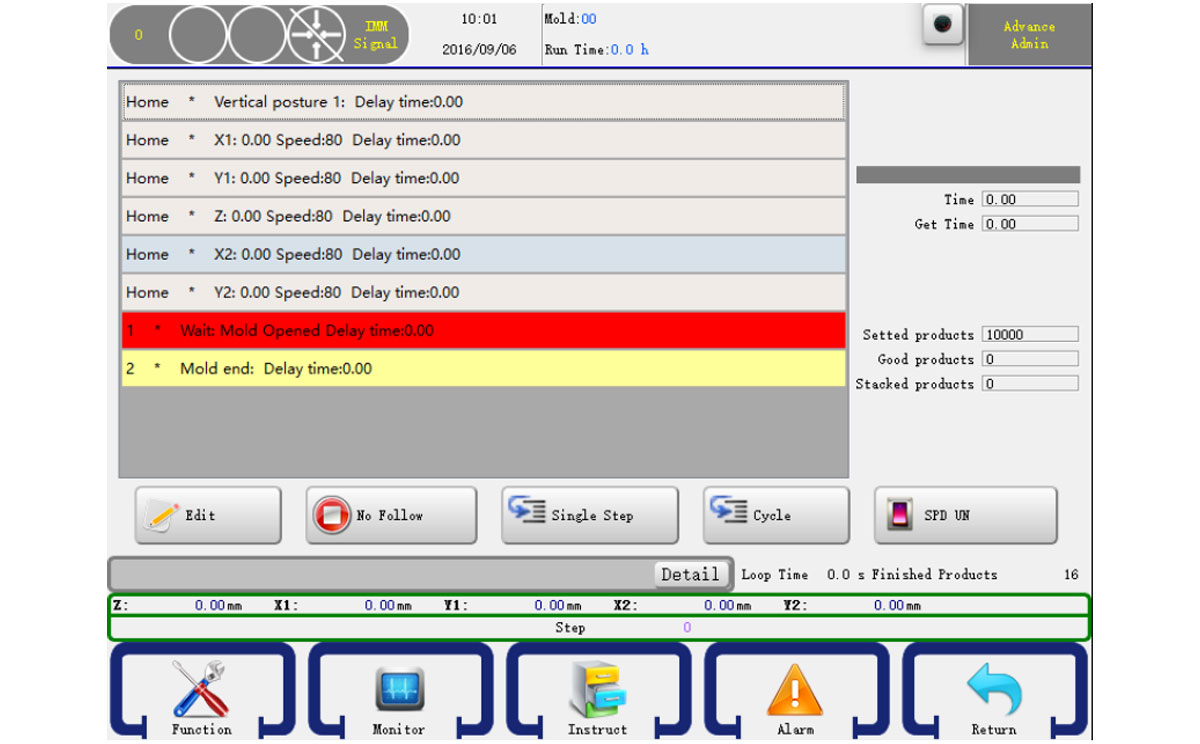
- Zeitraum: Zeitliche Unterbrechung im automatischen Ausführungszyklus.
- Entnahmezeit: Die Zeit, die der Roboter benötigt, um das Produkt zu holen und aus dem Auto zu nehmen.
- Eingestellte Produkte: Die Produktmenge pro Set. Ein Alarm wird ausgelöst, wenn der Produktzähler erreicht ist.
- Qualifiziert: Die Anzahl der vom Roboterarm entnommenen Teile.
- Stapelanzahl: Die Anzahl der Produkte, die vom Roboter gestapelt wurden.
- Schleifenzeit: Die Zeit nach einem Ausführungszyklus im Auto.
- Anzahl fertiger Produkte: Die Anzahl der fertigen Produkte.
5.3.2 Laufende Konfigurationen anpassen
Im automatischen Ausführungsstatus können Sie die Aktion der Programmkonfigurationen ändern. Wählen Sie einfach einen Schritt aus und klicken Sie dann auf die Schaltfläche „Bearbeiten“. Daraufhin wird ein Editordialog angezeigt. Nach einem Klick auf „OK“ werden die Daten übernommen und im nächsten Zyklus gemäß Ihren Einstellungen ausgeführt. Mit „Abbrechen“ brechen Sie den Vorgang ab.
Um sicherzustellen, dass diese Einstellungen keine Schäden an Roboter, Maschine oder Form verursachen, ist ein Toleranzbereich von 5 mm zulässig. Wie unten gezeigt:
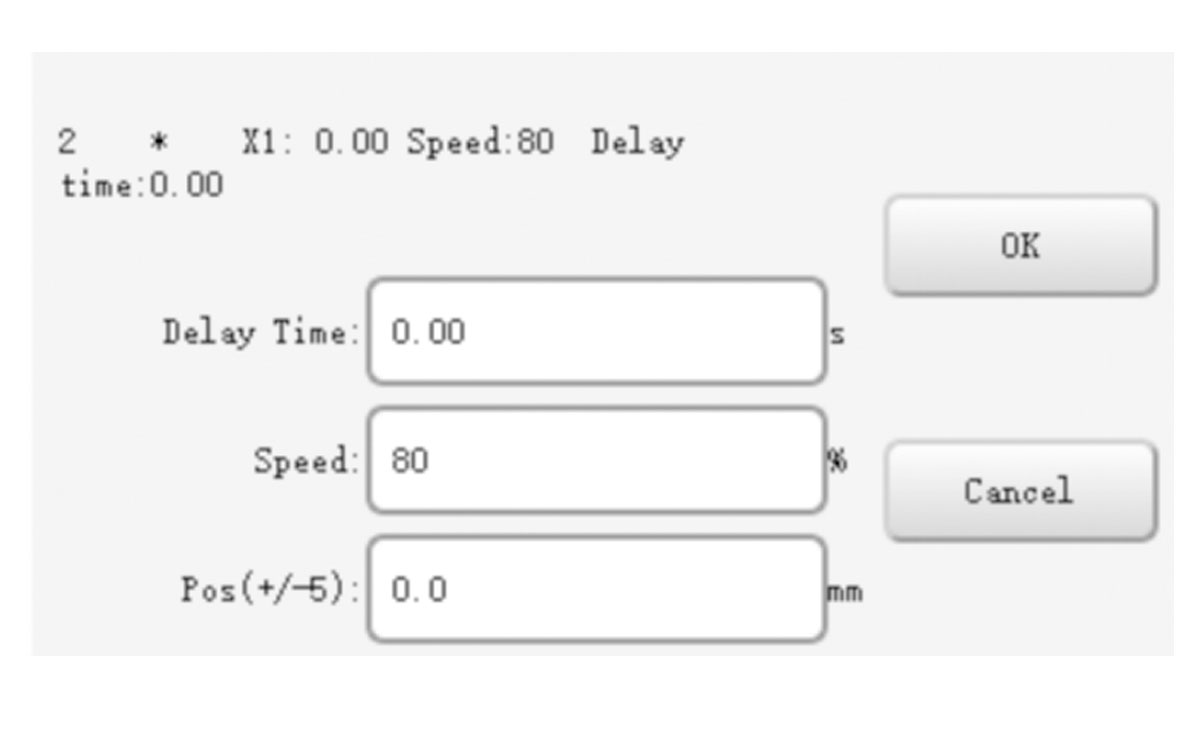
Wenn Sie fertig sind, klicken Sie einfach auf die Schaltfläche „OK“, um Ihre Änderung zu bestätigen.
5.3.3 Einzelschrittlauf
Im automatischen Ausführungsstatus können Sie einen Schritt durch Klicken auf die Schaltfläche ausführen. Ein erneuter Klick führt den nächsten Schritt aus usw. Diese Funktion ist sehr nützlich beim Debuggen Ihres Programms.
5.3.4 Geschwindigkeitsanpassung
Klicken Sie auf die Schaltfläche „Geschwindigkeit“, sodass sie zur „Geschwindigkeitsanzeige“ wird. Passen Sie die Gesamtgeschwindigkeit an, indem Sie auf der Tastatur und im Bedienfeld in der unteren linken Ecke auf „Geschwindigkeitsanpassung“ drücken.







