
sales06@switek.biz

+86 186 5927 5869

Shopping

Subscrib to Us
sales06@switek.biz
+86 186 5927 5869
Shopping
Subscrib to Us
Keywords:IML Robot; IML Robot Operating; In Mold Labeling Robotics
In our daily use of an IML robot, it's a good habit to backup the program after the parameters setting in case that there's a wrong operating or setting in the future. In this chapter we'll discuss how to export the program of the IML robot to a USB and how to reload a program from the USB key.
The following requirements must be met when using PENDANT to download the program:
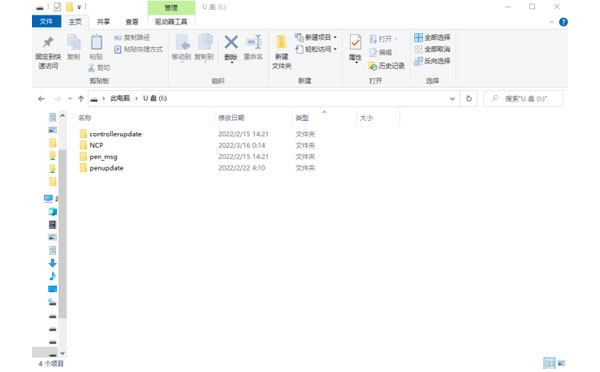
First of all, you need to create 4 new folders in the USB root directory:
[penupdate], [pen_msg], [controllerupdate], [NCP]
Place the downloaded file inside the corresponding folder, see the table below:
A List of Corresponding Files
| Folder on the left | File on the right | Illustrate | |
|---|---|---|---|
| [penupdate] | pne_set | pendant setup | the reboot takes effect |
| pendant-gui | Qt linux executable file | ||
| pen_msg | all_msg.txt | Pendant Textual information | |
| Other msg... | Pendant Textual information | ||
| [controllerupdate] | TRC1000.dsb | Controller action program | |
| TRC1000.dop | Controller initialization, setup | ||
| motc.dat | Motion control programs | ||
| machine01 | Mechanical parameter program 01 | ||
| ... | ... | ||
| machine32 | Mechanical parameter program 32 | ||
| [NCP] | NCP01.NCP | NCP File | Compiles to take effect |
| ... | |||
| NCP99.NCP | NCP File | ||
Insert the USB into the USB port of the handset, and it is recommended to choose a regular brand of USB that has not been specially handled.
Tap the [File Management] icon at the top of the screen  , select [Import from USB].
, select [Import from USB].
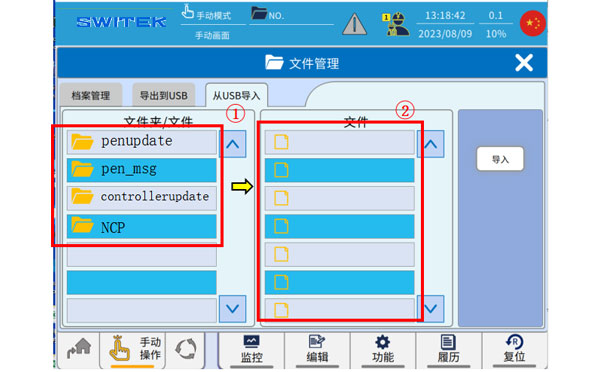
When a file is recognized in the USB, [Import from USB] displays the folder prepared in advance on the USB flash drive.
Click to select the folder in (2) to display the subfiles in the folder in (1), select the subfiles you want to import, and click Import. (If you only select (2) and click[Import], all the contents of the folder will be downloaded).
After the download is complete, the downloaded file will be restarted according to the prompts of the downloaded file, and the downloaded file will take effect after the restart.
For details of whether you need to restart, please refer to the [File Download Table]

SW6710S
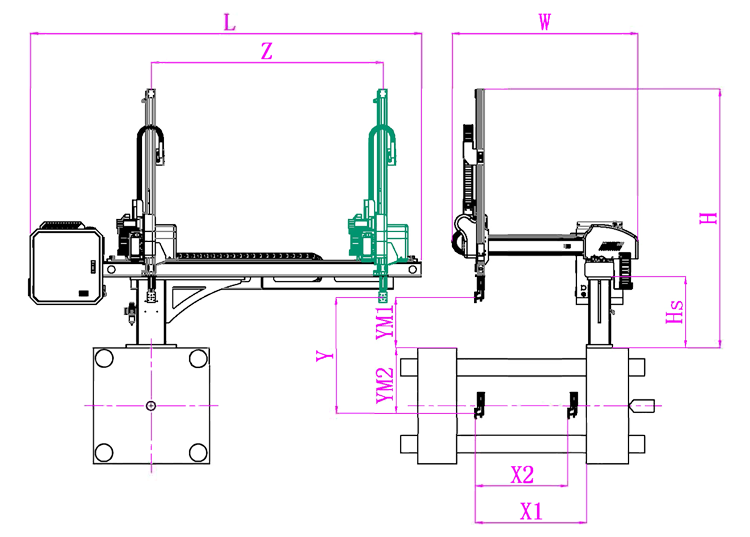
Unit: mm
| X1 | X2 | X3 | X4 | Y | YM1 | YM2 | Z | L | W | H | Payload | 900 | 750 | 0 | 0 | 1000 | 420 | 580 | 1750 | 2780 | 1610 | 1930 | 8kg |
|---|
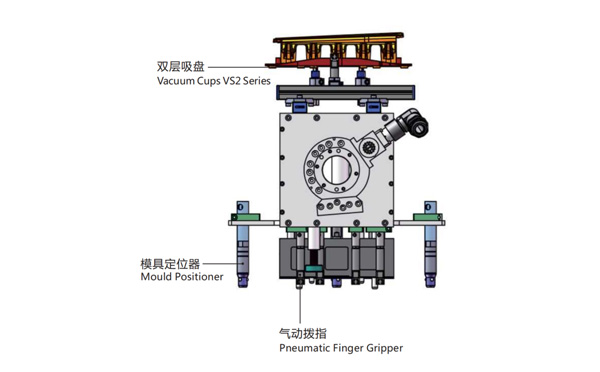
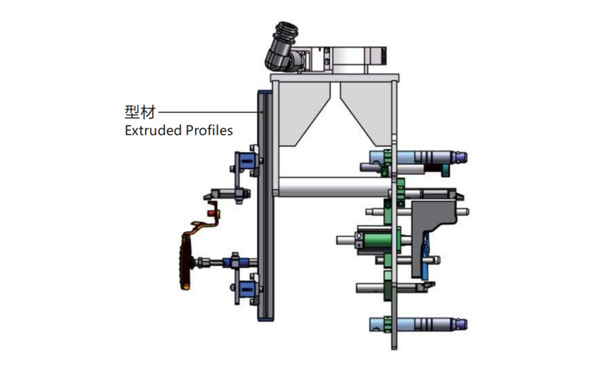
EOAT Assembly Demonstration -- One Cavity In Mold Insertion EOAT With Mold Positioner
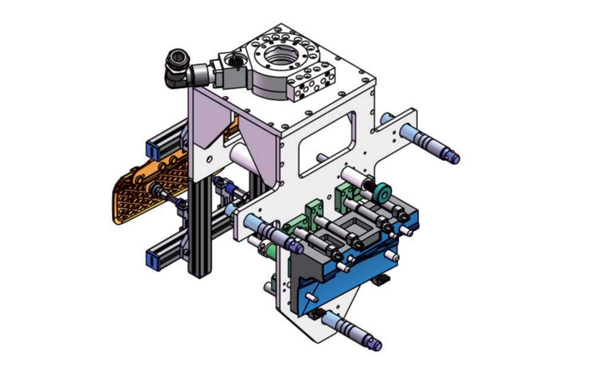
Product Descriptions
Bom List
| Product Name | PN # | Model | Quantity |
|---|---|---|---|
| Extruded Profiles | 4.Y00481 | PEP2525-1500 | 1 |
| Plugs for Profile | 4.Y00070 | PEP2525 | 8 |
| Mould Positioner | 8.Y00088 | GMP20A | 3 |
| Vacuum Cups VS2 Series | 1.Y05310 | VS2-SA20 | 2 |
| Rotative Suspensions | 8.Y00061 | VFR1421-G18 | 2 |
| Pneumatic Finger Gripper | 8.Y00084 | GFR14-95G | 7 |
| Extension Tube | 7.Y00733 | SMBY14-50 | 6 |
| Mounting Bracket | 7.Y00200-T | SMBE1-1440T | 3 |
| Cross Mounting Bracket for Profiles | 7.Y00194-T | SMBA-2525T | 4 |
| Vacuum Cup Fittings | 7.Y00703 | VM02-G18 | 2 |
For a Container with a Height of 100mm, What Would be the Minimal Opening Stroke of the Injection Molding Machine?
As we know, for the IML production of a container, the robot will do the actions of parts picking and label inserting in the mold, which means that the system will request a much larger in mold space compared to non-IML production. While selecting an injection molding machine for your IML project, the opening stroke of the injection molding machine would be a very important parameter to be taken into consideration. The basic formular for the opening stoke caculation would be heigh of the parts x 3 + 150mm, the potential injection molding machine must have a larger opening stroke, or the robot may not able to pick the parts and insert the labels symtaneously.


