
sales06@switek.biz

+86 186 5927 5869

Shopping

Subscrib to Us
sales06@switek.biz
+86 186 5927 5869
Shopping
Subscrib to Us
Keywords:PETRI DISH PACKING SYSTEM, PETRI DISH INJECTION MOLDING SOLUTIONS
The "Position page" of the side entry petri dish packing system is for the operator to move the axises of the system to the position setted manually while start the system up. Here in this chapter will explain the meaning of each button on the position page of the petri dish packing system.
Position Page 1
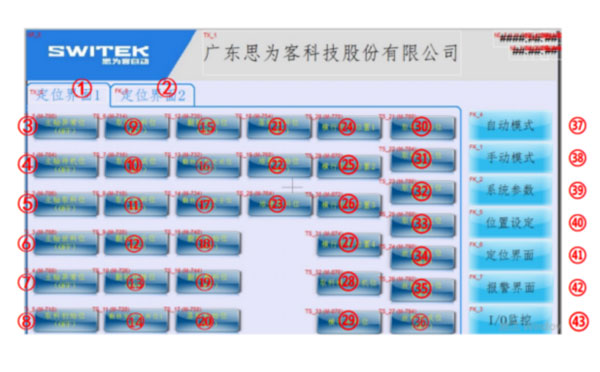
| No. | Description |
|---|---|
| 1 | Position Setting (Pos Interface 1) 570 |
| 2 | Position Page 2 (Pos Interface 2) 571 |
| 3 | Main Axis Exceptional Position (Main Exc [OFF]) 444 |
| 4 | Main Axis Standby Position (Main Sby [OFF]) 445 |
| 5 | Main Axis Petri Dish Picking Position (Main Coll [OFF]) 456 |
| 6 | Main Axis Petri Dish Releasing Position (Main Rel [OFF]) 447 |
| 7 | Main Axis Exceptional Position (Main Exc [OFF]) 444 |
| 8 | Petri Dish Picking Initial Position (Mat Coll Init [OFF]) 448 |
| 9 | Petri Dish Picking Position (Mat Coll [OFF]) 449 |
| 10 | Petri Dish Collecting Finish Position (Mat Cmpl [OFF]) 450 |
| 11 | Petri Dish Release Position (Mat Rel Pos [OFF]) 451 |
| 12 | Petri Dish Safely Flipping Position (Flip Safe [OFF]) 452 |
| 13 | Flipped Petri Dish Tranfer Position (Flip Trans [OFF]) 453 |
| 14 | The Flipped Petri Dish to be Safely Released Position 1 (Flip Rel Safe 1 [OFF]) 454 |
| 15 | The Position where the Flipped Petri Dish Released (Flip Rel [OFF]) 455 |
| 16 | The Flipped Petri Dish Release Finished Position (Flip Rel Cmpl [OFF]) 456 |
| 17 | Petri Dish Flipping Finish Position (Flip Cmpl Safe [OFF]) 457 |
| 18 | Petri Dish Flipping Initial Position (Flip Init [OFF]) 458 |
| 19 | Petri Dish Flipping Position (Flip Pos [OFF]) 459 |
| 20 | Petri Dish Dropping Initial Position (Drop Init [OFF]) 460 |
| 21 | Petri Dish Dropping Position (Drop [OFF]) 461 |
| 22 | Petri Dish Stacking Initial Position (Stacking Init [OFF]) 462 |
| 23 | The Stacked Petri Dish Dropping Position (Stacking Drop) 599 |
| 24 | The Stacked Petri Dish Horizontal Picking Position 1 (Horiz Pick Pos 1) 600 |
| 25 | The Stacked Petri Dish Horizontal Picking Position 2 (Horiz Pick Pos 2) 601 |
| 26 | The Stacked Petri Dish Horizontal Picking Position 3 (Horiz Pick Pos 3) 602 |
| 27 | The Stacked Petri Dish Horizontal Picking Position 4 (Horiz Pick Pos 4) 603 |
| 28 | The Stacked Petri Dish Horizontal Picking Standby Position (Pick Horiz Standby) 604 |
| 29 | Stacked Petri Dish Horizontal Releasing Position (Horiz Material Placing) 605 |
| 30 | Stacked Petri Dish Picking Initial Position (Material Pick Init) 606 |
| 31 | Stacked Petri Dish Picking Standby Position (Mat Coll Sby [OFF]) 467 |
| 32 | Stacked Petri Dish Picking Position (Mat Coll [OFF]) 449 |
| 33 | Stacked Petri Dish Picking Finish Position (Mat Cmpl [OFF]) 450 |
| 34 | Stacked Petri Dish Release Standby Position (Mat Rel Sby [OFF]) 468 |
| 35 | Stacked Petri Dish Release Position (Mat Rel [OFF]) 469 |
| 36 | Stacked Petri Dish Release Finish Position (Mat Rel Cmpl [OFF]) 470 |
| 37 | Auto Mode (Auto) |
| 38 | Manual Mode (Manual) |
| 39 | System Parameters (Sys Params) |
| 40 | Position Setting (Pos Set) |
| 41 | Position Interface (Pos Interface) |
| 42 | Alarm Interface |
| 43 | I/O Monitor (I/O Mon) |
Position Page 2
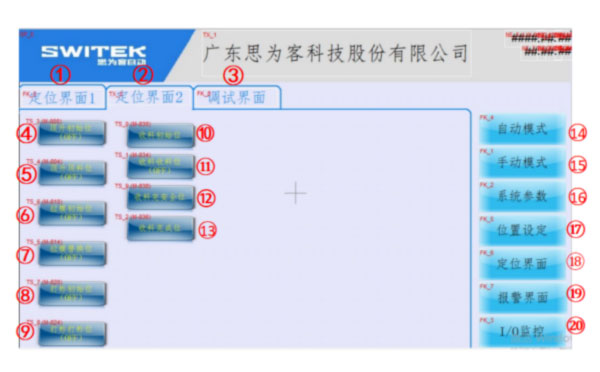
| No. | Description |
|---|---|
| 1 | Position Interface 1 (Pos Interface) 570 |
| 2 | Poition Interface 2 (Pos Interface) 571 |
| 3 | Debugging Page (DebugPg) 708 |
| 4 | Stacked Petri Dish Lifting Initial Position (Lift Init [OFF]) 471 |
| 5 | Stacked Petri Dish Lifting Position (Lift Mat [OFF]) 472 |
| 6 | Sleeve Pulling Initial Position (Pull Mold Init [OFF]) 473 |
| 7 | Sleeve Pulling Replace Position (Pull Mold Rep [OFF]) 474 |
| 8 | Mark Printing Initial Position (Mark Init [OFF]) 475 |
| 9 | Mark Print Position (Mark [OFF]) 476 |
| 10 | Packed Petri Dish Receiving Initial Position (Receiving Init Pos) 607 |
| 11 | Packed Petri Dish Collected Position (Mat Coll [OFF]) 478 |
| 12 | Packed Petri Dish Safe Collecting Position (Recep Safety Pos) 729 |
| 13 | Packed Petri Dish Received Position (Material Receivi) 608 |
| 14 | Auto Mode (Auto) |
| 15 | Manual Mode (Manual) |
| 16 | System Parameters (Sys Params) |
| 17 | Position Setting (Pos Set) |
| 18 | Position Interfacing (Pos Interface) |
| 19 | Alarm Interface |
| 20 | I/O Monitor (I/O Mon) |
SW7730DS
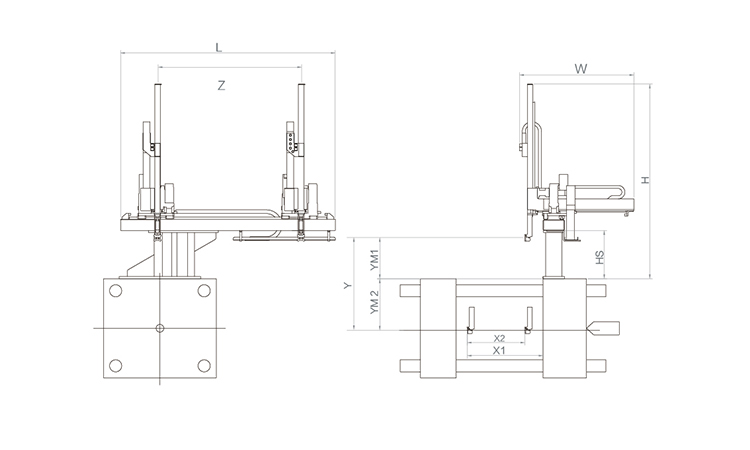
Unit: mm
| X1 | X2 | X3 | X4 | Y | YM1 | YM2 | Z | L | W | H | Payload | 2250 | 1720 | 0 | 0 | 3000 | 780 | 2220 | 4000 | 5050 | 3005 | 3440 | 75kg |
|---|
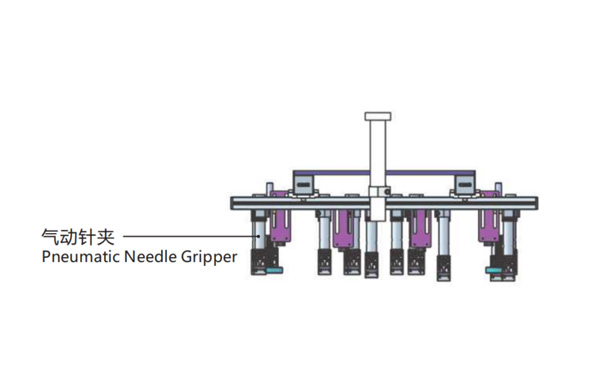
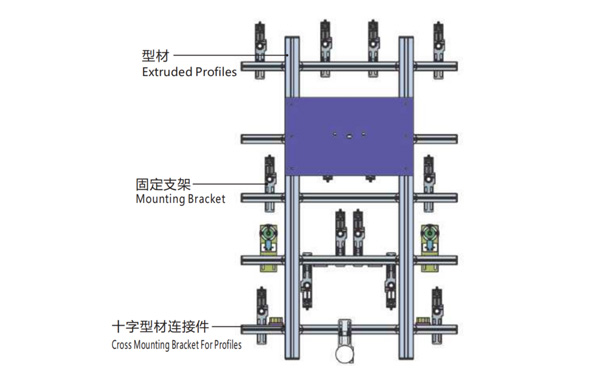
EOAT Assembly Demonstration -- Two Cavities Non-woven Fabric In Mold Insertion
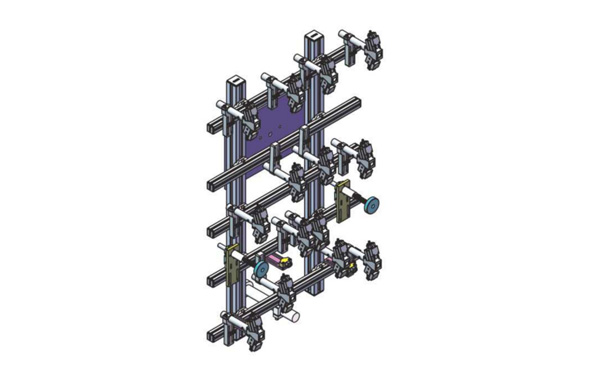
Product Descriptions
Bom List
| Product Name | PN # | Model | Quantity |
|---|---|---|---|
| Extruded Profiles | 4.Y00052 | PEP4040-1000 | 2 |
| Plugs for Profile | 4.Y00072 | PEP4040 | 4 |
| Extruded Profiles | 4.Y000481 | PEP2525-1500 | 2 |
| Extruded Profiles | 4.Y00481 | PEP2525-1000 | 1 |
| Plugs for Profile | 4.Y00070 | PEP2525 | 10 |
| Cross Mounting Bracket for Profiles | 7.Y00356-T | SMBA-2540T | 10 |
| Pneumatic Needle Gripper | 8.Y00025 | GN2010 | 14 |
| Mounting Bracket | 7.Y00308-T | SMBE2-2060T | 14 |
| Mounting Bracket | 7.Y00309-T | SMBE2-3060T | 1 |
What would be a price smart configuration for the production of 20L paint buckets?
With more producers of the pails for paints introduced IML system in their production, it make the IML paints pails market getting more and more competitive. With a lower investment on the facilities will no doubt help to earn the investment back faster. Here is some recommendation of the IML solutions for 20L buckets for your reference.
As a 20L IML pails would be produced in an injection molding machine around 700T with a cycle time of 25s or longer, the robot to recommed would be SW7518DS by SWITEK Automation which is a 3 axis servo injection robot with a kick-back design, the best structure for deep cavity parts picking like an IML pails. It's the top choosed robot for an IML system of 20L paint buckets.
As a deep cavity IML container, the injection molding machine would be very important because it'll request a much larger opening stroke to ensure that the IML robot will have sufficient space to pick the buckets and insert the label. The injection molding machine to recommend here is the HD700U seriese of injection molding machine produced by HAIDA. This machine is specially designed for the production of IML pails > 20L with enlarged opening strokes.
For any more questions about the production of 20L IML pails for paints please just feel free to contact Adams to get a ready to work turn-key IML solution.



