
sales06@switek.biz

+86 186 5927 5869

Shopping

Subscrib to Us
sales06@switek.biz
+86 186 5927 5869
Shopping
Subscrib to Us
Keywords:PETRI DISH PACKING SYSTEM, PETRI DISH INJECTION MOLDING SOLUTIONS
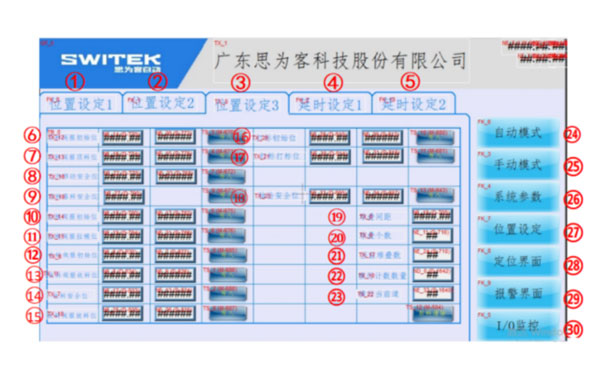
The position setting pages are for the operator of the SWITEK petri dish packing system from where should the robotic arms to pick the petri dish and by where should the petri dishes to be placed or stacked or packed. Here in this chapter we'll introduce the setting of the position of the axis of the SWITEK side entry petri dish packing system.
Position Setting 1

| No. | Description |
|---|---|
| 1 | Position Setting 1 (Pos Set 1) 400 |
| 2 | Position Setting 2 (Pos Set 2) 401 |
| 3 | Position Setting 3 (Pos Set 3) 402 |
| 4 | Delay Setting 1 (Delay Set 1) |
| 5 | Main Arm Parts Relese Position (Main Arm Rel) 425 |
| 6 | Main Arm Standby Position (Main Arm Sby) 426 |
| 7 | Main Arm Petri Dish Picking Position (Main Arm Coll) 427 |
| 8 | The Position where the Main Arm Allowed to Start a Pre-active (Main Arm Adv) 428 |
| 9 | The Main Arm Exception Position (Main Arm Exc) 429 |
| 10 | Mold Close Enable Position (Allow Mold Close Safe) 430 |
| 11 | Petri Dish Picking Initial Position (Mat Coll Init) 431 |
| 12 | Petri Dish Picking Position (Mat Coll) 432 |
| 13 | Petri Dish Picking Finish Position (Mat Coll Cmp) 433 |
| 14 | Petri Dish Picking Finish Safe Position (Mat Coll Safe) 434 |
| 15 | Petri Dish Picking and Placing Position (Mat Rel) 435 |
| 16 | |
| 17 | Petri Dish Abnormal Picking/Placing Position (Anomaly Location) 582 |
| 18 | Flipping Safe Position (Flip Safe) 437 |
| 19 | Flipping Transfer Position (Flip Trans) 438 |
| 20 | Flipping & Petri Dish Placing Safe Position (Flip Rel Safe) 439 |
| 21 | Flipping Safe Starting Position (Flip Safe Start) 440 |
| 22 | Petri Dish Flipping Place Position (Flip Rel) 441 |
| 23 | Petri Dish Flipping Place Finish Position (Flip Cmpl) 442 |
| 24 | Petri Dish Flipping Place Finish Safe Position (Flip Cmpl Safe) 443 |
| 25 | Auto Mode (Auto) |
| 26 | Manual Mode (Manual) |
| 27 | System Parameters (Sys Params) |
| 28 | Position Settings (Pos Set) |
| 29 | Position Interface (Pos Interface) |
| 30 | Alarm Interface |
| 31 | I/O Monitor (I/O Mon) |
Position Setting 2

| No. | Description |
|---|---|
| 1 | Position Setting (Pos Set 1) 400 |
| 2 | Position Setting (Pos Set 2) 401 |
| 3 | Position Setting (Pos Set 3) 402 |
| 4 | Delay Setting (Delay Set 1) 403 |
| 5 | Petri Dish Flipping Initial Position (Flip Init) 405 |
| 6 | Petri Dish Flipping In Place (Flip) 406 |
| 7 | Petri Dish Dropping Initial Position (Init Blanking) 583 |
| 8 | Petri Dish Dropping Position (Blank Discharging) 584 |
| 9 | Petri Dish Stacking Initial Position (Stack Init) 407 |
| 10 | Stacked Petri Dish Dropping Position (Stack Drop) 408 |
| 11 | Petri Dish Stacking Conveyor Stop Position (Stop Conveyor) 585 |
| 12 | Up/Don Initial Position (Up-Dwn Init) 409 |
| 13 | Up/Down Standby Position (Up-Dwn Sby) 410 |
| 14 | Up-Down Petri Dish Collecting Position 411 |
| 15 | Up-Down Petri Dish Collecting Complete Position (Up-Dwn Coll Cmpl) 412 |
| 16 | Up-Down Petri Dish Release Standby Position (Up-Dwn Rel Sby) 413 |
| 17 | Up-Down Petri Dish Release Position (Up-Down Rel) 414 |
| 18 | Up-Down Petri Dish Release Finished Position (Up-Down Rel Cmpl) 415 |
| 19 | Horizontal Petri Dish Collecting Position (Horiz Coll1) 416 |
| 20 | Horizontal Petri Dish Collecting Position (Horiz Coll 2) 417 |
| 21 | Horizontal Petri Dish Collecting Position (Horiz Coll 3) 418 |
| 22 | Horizontal Petri Dish Collecting Position (Horiz Coll 4) 419 |
| 23 | Horizontal Petri Dish Standby Position (Horiz Standby) 586 |
| 24 | Horizontal Petri Dish Release Position (Horiz Rel) 420 |
| 25 | Auto Mode (Auto) |
| 26 | Manual Mode (Manual) |
| 27 | System Parameters (Sys Params) |
| 28 | Position Setting (Pos Set) |
| 29 | Position Interface (Pos Interface) |
| 30 | Alarm Interface |
| 31 | I/O Monitor (I/O Mon) |
Position Setting 3
| No. | Description |
|---|---|
| 1 | Position Setting 1 (Pos Set 1) 400 |
| 2 | Position Setting 2 (Pos Set 2) 401 |
| 3 | Position Setting 3 (Pos Set 3) 402 |
| 4 | Delay Setting (Delay Set1) 403 |
| 5 | Delay Setting (Delay Set 2) 404 |
| 6 | Petri Dish Poping Servo Initial Position (Top Init Pos) 421 |
| 7 | Petri Dish Poping Servo Poping Position (Top Pos) 422 |
| 8 | Safe Moving Position (Moving Safety) 587 |
| 9 | Petri Dish Cover Dropping Safety Position (Blank Safety Pos) 730 |
| 10 | Sleeve Pulling Servo Initial Position (Pull Mold Init) 423 |
| 11 | Sleeve Pulling Starting Position (Pull Mold) 424 |
| 12 | Petri Dish Collecting Initial Position (Mat Coll Init) 479 |
| 13 | Petri Dish Pick Up Position (Pick-up Station) 576 |
| 14 | Petri Dish Collecting Safe Position (RecServo SP) 709 |
| 15 | Petri Dish Collecting Servo Parts Release Position (Mat Coll Rel) 480 |
| 16 | Mark Printing Initial Position (Maring Init Pos) 731 |
| 17 | Mark Printing Position (Adjus Maring Pos) 732 |
| 18 | Sampling Safety Position (Spot Check Safe) 746 |
| 19 | Stacking Space 481 |
| 20 | Number Stacked (Num Stacks) 482 |
| 21 | Currently Stacked Number (Stack Count) 694 |
| 22 | Horizontal Counting Number (Horiz Mat Ctr) 483 |
| 23 | Horizontal Current Counting Number (Rampant Behavior Count) 748 |
| 24 | Auto Mode (Auto) |
| 25 | Manual Mode (Manual) |
| 26 | System Parameters (Sys Params) |
| 27 | Position Settings (Pos Set) |
| 28 | Position Interface (Pos Interface) |
| 29 | Alarm Interface |
| 30 | I/O Monitor (I/O Mon) |

SW6308D-20
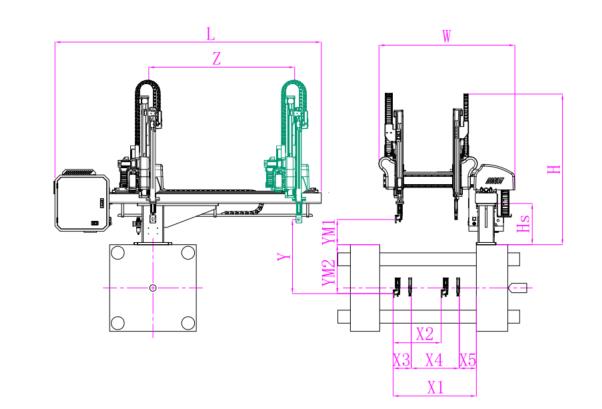
Unit: mm
| X1 | X2 | X3 | X4 | Y | YM1 | YM2 | Z | L | W | H | Payload | 740 | 640 | 140 | 415 | 800 | 235 | 565 | 1350 | 2320 | 1500 | 1460 | 3kg |
|---|
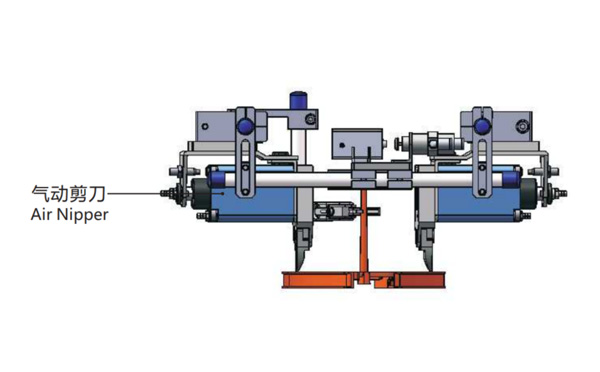
EOAT Assembly Demonstration -- Two Cavities Parts Picking EOAT with Runner Cutting by Air Nipper
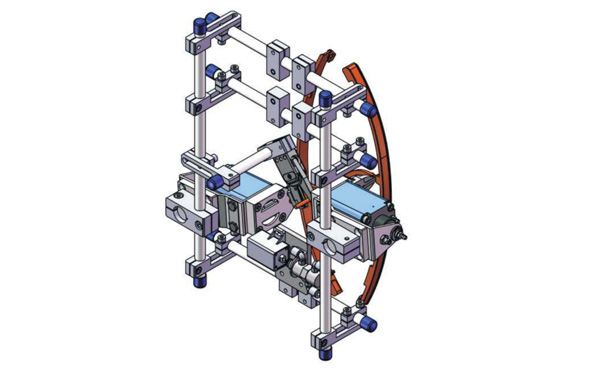
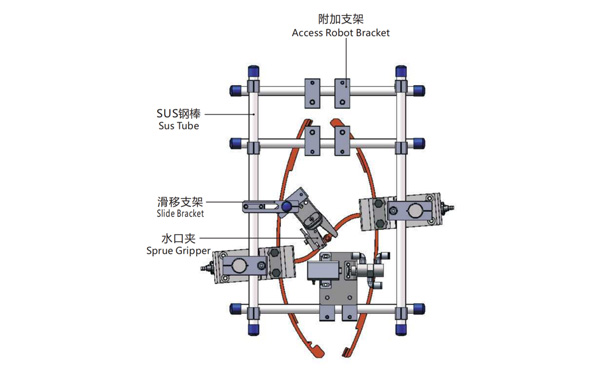
Product Descriptions
Bom List
| Product Name | PN # | Model | Quantity |
|---|---|---|---|
| Sus Tube | 4.Y00021 | PST12-1500 | 2 |
| Air Nipper | 1.Y00004 | GT-NY25 | 2 |
| Straight Blades for Plastic | 1.Y00037 | NY25AJ | 2 |
| Fixing Block | 7.Y00633 | SCE2-25 | 2 |
| Tube Plugs | 1.Y03638 | PST12-1500 | 11 |
| Cross Connector | 7.Y00027 | SMBT-2012 | 2 |
| Access Robot Bracket | 7.Y00002 | SMBH1-12M6 | 6 |
| L-Type Thread Hose Fitting | 1.Y02809 | APL6-M5 | 3 |
| Slide Bracket | 7.Y00004 | SCF4-1240W16 | 7 |
| Slide Bracket | 7.Y00001 | SMBS-12T16 | 7 |
| Sprue Gripper | 8.Y00091 | GR12-12-CN | 1 |
| Cross Connector | 7.Y00020 | SMBT-1212 | 1 |
Why is BOLE BL530EKH an Ideal Injection Molding Machine for 20L IML Paints Pails Project?
BL530EKH is a hydraulic servo energy saving injection molding machine with a clamping force of 5300kN with BOLE central clamping toggle technology, which will have a higher clamping force efficiency against traditional edge clamping force and can save 2~5% material. But, the most attractive feature of this machine to an IML Paint Buckets projector is its opening stroke: 850mm.
For any IML projectors of 20L IML paint buckets the opening stroke is very important to compose an IML system economically. With an opening stroke of 850mm it means that this BL530EKH is suitable for the IML production of most paint buckets with a height < 350mm. It'll have most of the 20L paint buckets included. Compared to its counter part of which mostly would be injection molding machine > 600T, it would be a big budget saving.
Anyway before any decision made about the which injection molding machine to choose for your IML project, the right process would be to provide the sample or 3D drawing of the paint bucket of which you want to produce so SWITEK engineer will evaluate it and make a professional advisory accordingly. If you still have any question about IML paint buckets production please feel free to contact Adams from SWITEK for a budget smart solutions of IML.



