
sales06@switek.biz

+86 186 5927 5869

Shopping

Subscrib to Us
sales06@switek.biz
+86 186 5927 5869
Shopping
Subscrib to Us
Keywords:PETRI DISH PACKING SYSTEM, PETRI DISH INJECTION MOLDING SOLUTIONS
The servo driver in the SWITEK Side Entry Petri Dish Packing System is in control of the movement of the axis to finish the action of petri dish picking, assembly, sleeve pulling, sealing etc. to finish the production process from the petri dish picking to packing. Here in this chapter you'll have a clear understanding of the setting of the servo motor manually to have the system working efficiently.
Servo Manual Setting 1
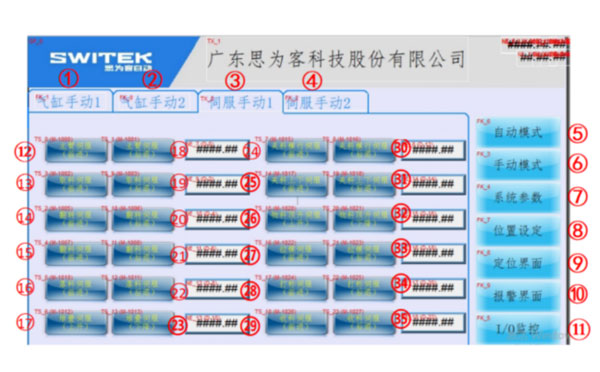
| No. | Description |
|---|---|
| 1 | Manual Cylinder Setting (Man Cyl) 1 |
| 2 | Manual Cylinder Setting (Man Cyl) 2 |
| 3 | Manual Servo Setting (Servo Man 1) |
| 4 | Manual Servo Setting (Servo Man 2) |
| 5 | Auto Mode (Auto) |
| 6 | Manual Mode (Manual) |
| 7 | System Parameters (Sys Params) |
| 8 | Position Setting (Pos Set) |
| 9 | Position Interface (Pos Interface) |
| 10 | Alarm Interface |
| 11 | I/O Monitor |
| 12 | Main Arm Servo (Forward) 141 |
| 13 | Parts Picking Servo (Forward) (Mat Coll 1 [Adv]) |
| 14 | Flipping Servo (Forward) (Flip [Adv]) 143 |
| 15 | Parts Flipping Servo (Forward) (Mat Flip [Adv]) 144 |
| 16 | Part Dropping Servo (Forward) (Drop Mat [Adv) 145 |
| 17 | Stacking Servo Up (Stack [Up]) 146 |
| 18 | Main Arm Servo (Backward) (Main Arm [Ret]) 147 |
| 19 | Parts Picking Servo (Backward) (Mat Coll1 [Ret]) 148 |
| 20 | Flipping Servo (Backward) (Flip [Ret]) 149 |
| 21 | Petri Dish Flipping Servo (Backward) (Mat Flip [Ret]) 150 |
| 22 | Petri Dish Dropping Servo (Backward) (Drop Mat [Ret]) 151 |
| 23 | Parts Stacking Servo (Downward) (Stack [Down]) 152 |
| 24 | Petri Dish Clipping Traverse Servo (Forward) (Clamp Tran [Adv]) 153 |
| 25 | Petri Dish Clipping Vertical Servo (Up/Down) (Clamp Vert [Adv]) 154 |
| 26 | Petri Dish Lifting (Upward) Servo (Mat Lift [Up]) 155 |
| 27 | Sleev Pulling (Forward) Servo (Pull Mold [Adv]) 156 |
| 28 | Mark Printing (Forward) Servo (Marking [Adv]) 157 |
| 29 | Petri Dish Collecting (Forward) Servo (Mat Coll2 [Adv]) 158 |
| 30 | Petri Dish Clipping Traverse (Backward) Servo (Clamp Tran [Ret]) 159 |
| 31 | Petri Dish Clipping Vertical (Up/Down) Servo (Clamp Tran [Ret]) 160 |
| 32 | Petri Dish Clipping Lift (Downward) Servo (Mat Lift [Dwn]) 161 |
| 33 | Sleeve Pulling (Retreat) Servo (Pull Mold [Ret]) 162 |
| 34 | Mark Printing (Retreat) Servo (Marking [Ret]) 163 |
| 35 | Petri Dish Collecting (Backward) Servo (Mat Coll [Ret]) 164 |
Servo Manual Setting 2
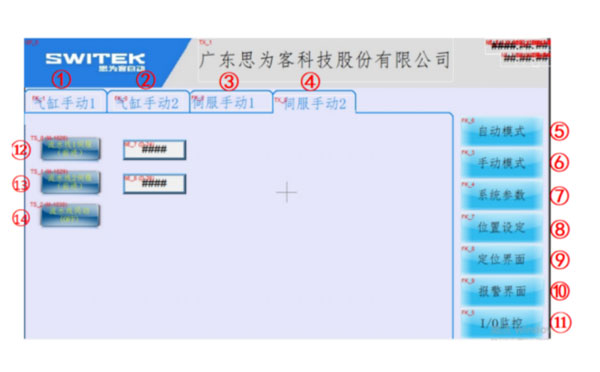
| No. | Description |
|---|---|
| 1 | Manual Cylinder 1 (Man Cyl1) |
| 2 | Manual Cylinder 2 (Man Cyl2) |
| 3 | Manual Servo 1 (Servo Man 1) |
| 4 | Manual Servo 2 (Servo Man 2) |
| 5 | Auto Mode (Auto) |
| 6 | Manual Mode (Manual) |
| 7 | System Parameters (Sys Params) |
| 8 | Position Setting (Pos Set) |
| 9 | Position Interface (Pos Interface) |
| 10 | Alarm Interface |
| 11 | I/O Monitor (I/O Mon) |
| 12 | Conveyor 1 Servo (Forward) (Conv 1 [Adv]) 165 |
| 13 | Conveyor 1 Servo (Backward) (Conv 1 [Ret]) 166 |
| 14 | Conveyor Synchronous (OFF) 658 (Line Sync [OFF]) |
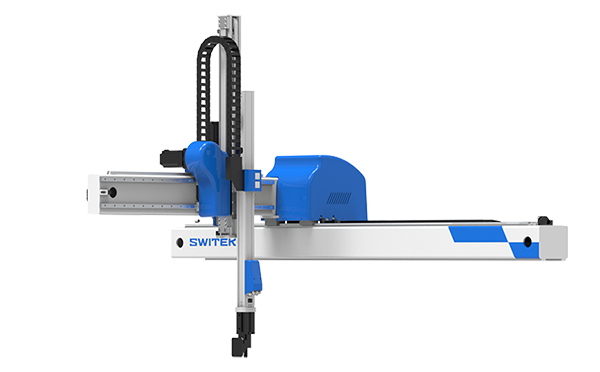
SW6308DS-20
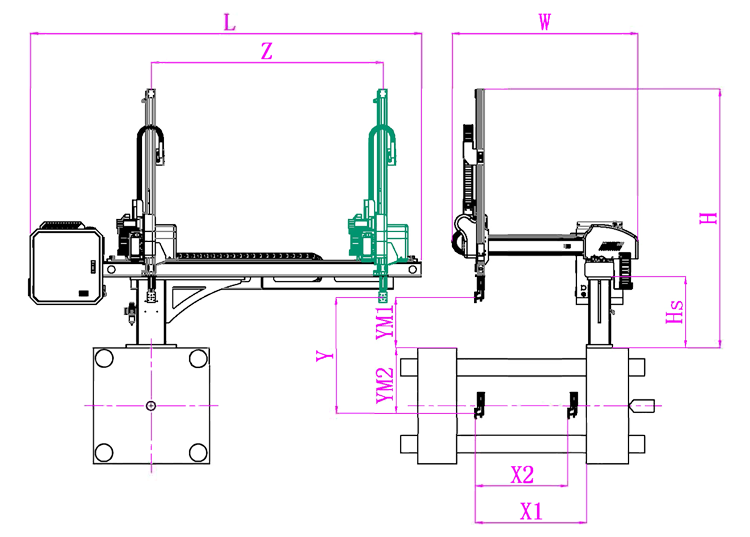
Unit: mm
| X1 | X2 | X3 | X4 | Y | YM1 | YM2 | Z | L | W | H | Payload | 740 | 800 | 0 | 0 | 800 | 235 | 565 | 1350 | 2320 | 1500 | 1460 | 3kg |
|---|
EOAT Assembly Demonstration -- Two Cavities Non-woven Fabric In Mold Insertion
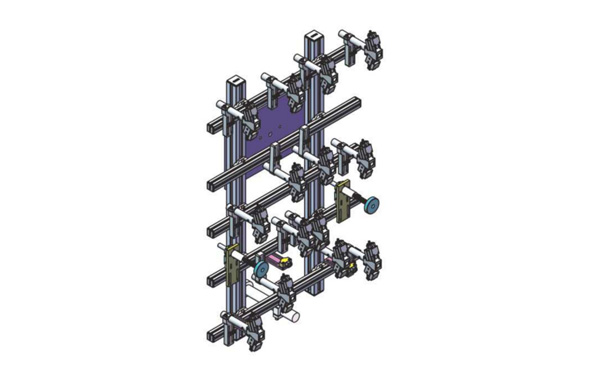
Product Descriptions
Bom List
| Product Name | PN # | Model | Quantity |
|---|---|---|---|
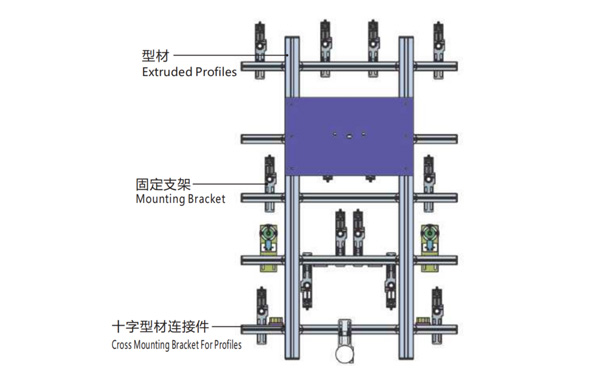
| Extruded Profiles | 4.Y00052 | PEP4040-1000 | 2 |
| Plugs for Profile | 4.Y00072 | PEP4040 | 4 |
| Extruded Profiles | 4.Y000481 | PEP2525-1500 | 2 |
| Extruded Profiles | 4.Y00481 | PEP2525-1000 | 1 |
| Plugs for Profile | 4.Y00070 | PEP2525 | 10 |
| Cross Mounting Bracket for Profiles | 7.Y00356-T | SMBA-2540T | 10 |
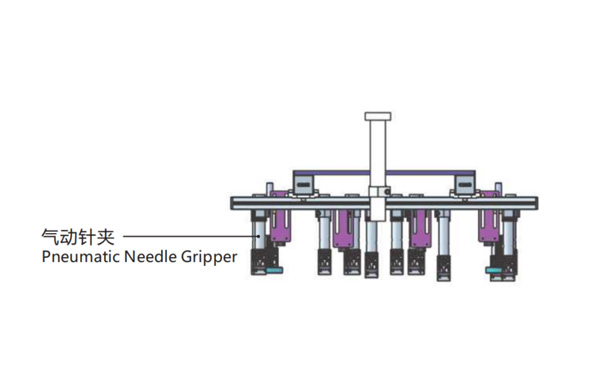
| Pneumatic Needle Gripper | 8.Y00025 | GN2010 | 14 |
| Mounting Bracket | 7.Y00308-T | SMBE2-2060T | 14 |
| Mounting Bracket | 7.Y00309-T | SMBE2-3060T | 1 |
Why is HMD270M8SPV One of the Best High Speed Hydraulic Injection Molding Machine for Small Size Containers IML Production?
As one of the best buy high speed hydraulic injection molding machine for thin-wall containers made in China, HMD270M8SPV is no doubt one an excellent injection molding machine for thin-wall containers high speed production. As the star injection molding machine by HMD group, HMD270M8SPV has the advangates below:
To match the excellent injection speed of HMD270M8SPV, the best IML robot would be SWITEK high speed side entry IML Robot SW833, with the control system by the European automation control system supplier SigmaTek, the dry cycle time of the IML robot can be lower than 2.1s, which will perfecctly match the productivity of HMD270M8SPV.


