
sales06@switek.biz

+86 186 5927 5869

Shopping

Subscrib to Us
sales06@switek.biz
+86 186 5927 5869
Shopping
Subscrib to Us
Keywords:IML Robot; IML Robot Operating; In Mold Labeling Robotics
Pendent setting here is to introduce how to set the parameters of the system which include the system seting, the user permissions setting, the Network setting etc. to have the IML robot working comfortably and safely.
System Setting
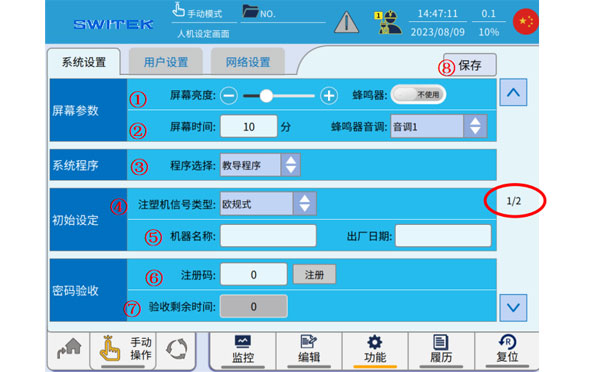
| No. | Name | Function |
|---|---|---|
| (1) | Screen Brightness | Adjust the screen brightness by "+" and "-". |
| (2) | Screen time | Tap to set the holding time for the screen to light up without operation. |
| (3) | Program selection | Use a teaching program or a fixed program selection. |
| (4) | IMM Selection | The European Style, Chinese style, and Japanese style of the injection molding machine are selected, and the signal processing (clearance, mold area safety, etc.) of different styles is different. |
| (5) | Machine name, Factory time | Set the name of the machine and the date of manufacture. |
| (6) | Registration code | After using the password acceptance function, you can obtain the permission and time of use through the registration code issued by the manufacturer. |
| (7) | Time remaining for accpetance | After using the password acceptance function, the remaining time to continue using it is displayed here. When the remaining time is 0, the robot will not be able to enter the automatic operation. |
| (8) | Save | After the above settings are modified, you must click Save. Otherwise, if the power is back on, the modified items may not be maintained. |
After you have modified each of the system settings, click "Save".
User settings

| No. | Name | Function |
|---|---|---|
| (1) | Set up | Click "√" to indicate that the function is enabled in the user permission. |
| (2) | Page | Scroll up or down to view the assignment of permissions. |
The operation authority of each user can be assigned through the setting in above figure to facilitate the operation and management of the site. (Higher-level users can be assigned permissions to low-level users by logging in. )
Network settings

As shown in the figure above, two sets of MODBUS communication IP addresses are set, please click "Save" when completed.
The two sets of IP addresses are set for the following two network ports:


SW6712
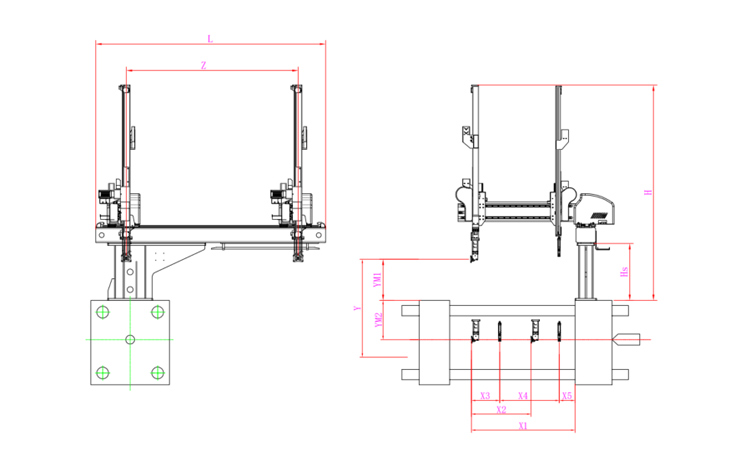
Unit: mm
| X1 | X2 | X3 | X4 | Y | YM1 | YM2 | Z | L | W | H | Payload | 1055 | 607 | 288 | 607 | 1200 | 420 | 780 | 1750 | 2340 | 1700 | 2460 | 8kg |
|---|
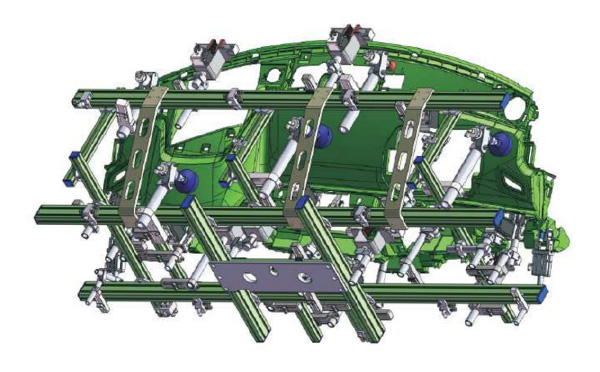
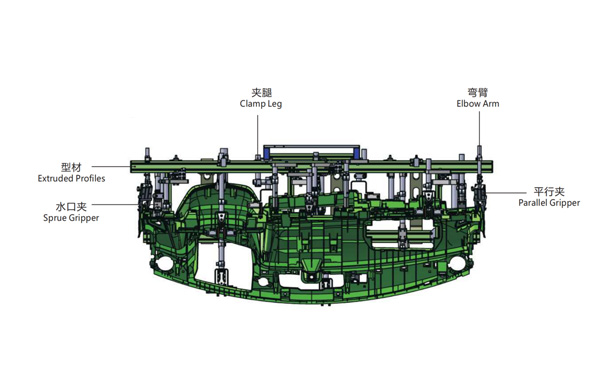
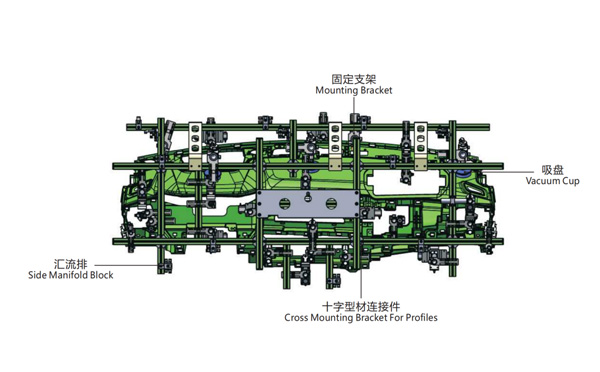
EOAT Assembly Demonstration -- One Cavity Instrument Panel Picking EOAT
Product Descriptions
Systec 350/720-1450 SP is an excellent high speed hydraulic injection molding machine by Sumitomo-Demag and warmly welcomed in the caps producing business. In a 32 cavities caps injection project, a 3 axis servo injection robot is wanted for the parts picking. Which one would be perefect for it?
SW7312DS is a kick-back design 3 axis servo injection robot for injection molding machine 350-650T wiht a payload up to 8kg. With excellent rigidity and stability, it had been popular in projects of closure picking, preform picking and handle picking etc. Is one of the best 3 axis servo injection robot for Demag Systec 350/720-1450 SP in caps injection project as the parts picking robot.


