Hochleistungs-IML-Roboter mit Seiteneinstieg
Schlüsselwörter:IML-Roboter; IML-Roboterbetrieb; In-Mold-Labeling-Robotik
SWITEK IML Roboter-Bedienungsanleitung – 3.5 Monitor
Abstrakt
Der hier beschriebene „Monitor“ ermöglicht Ihnen einen klaren Überblick über den Betriebszustand des Roboterarms. Auf der Monitorseite können Sie die Signale des Roboterarms, des EOAT, der Spritzgießmaschine sowie den Betriebszustand des Servomotors und des Steuerungssystems des IML-Roboters überprüfen, um die Fehlerstelle im System schnell zu diagnostizieren.
Klicken Sie auf das Symbol  , die folgende Seite wird angezeigt: Die Überwachungsseite:
, die folgende Seite wird angezeigt: Die Überwachungsseite:

| NEIN | Name | Funktion |
|---|---|---|
| (1) | Roboter/Vorrichtung/IMM | IO zeigt die Kategorie an; durch Klicken gelangen Sie schnell zur entsprechenden Signal-Seite. |
| (2) | Seite | Klicken Sie hier, um zur E/A-Seite zu wechseln. |
| (3) | IO-Anzeige | Echtzeit-EIN/AUS-Anzeige aller aktuellen Eingangs- und Ausgangspunkte. |
| (4) | Laufwerksüberwachung | Echtzeitanzeige von Drehzahl, Drehmoment, Lastrate und Abweichung jedes Achsenservomotors. |
| (5) | Interne Überwachung | Echtzeitanzeige des internen E/A-Status. |
Verwenden Sie (1) oder (2), um die IO-Anzeige umzuschalten. Die Frontleuchte leuchtet auf, um anzuzeigen, dass das Signal aktiv ist.
3.5.2 Laufwerksüberwachung
Echtzeitwerte
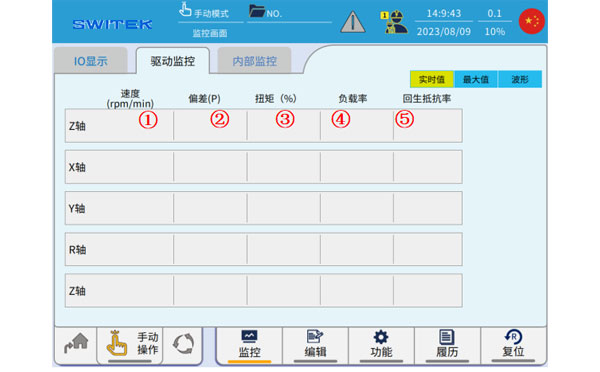
| NEIN | Name | Funktion |
|---|---|---|
| (1) | Drehzahl (U/min) | Echtzeitanzeige der Laufgeschwindigkeit jeder Achse. |
| (2) | Abweichung (P) | Echtzeitanzeige der Abweichungen in jeder Achse. |
| (3) | Drehmoment (%) | Echtzeit-Anzeige des Drehmoments in Prozent für jede Achse. Das momentane Drehmoment des Servomotors kann bis zu 300 % des Nenndrehmoments erreichen. |
| (4) | Lastfaktor | Echtzeitanzeige des Betriebslastfaktors jeder Achse. (100 % max.) |
| (5) | Widerstandsfähigkeitsrate | Echtzeitanzeige der Belastungsrate der Respawn-Resistenz. |
Maximal

| NEIN | Name | Funktion |
|---|---|---|
| (1) | Höchstgeschwindigkeit vorwärts | Eine Aufzeichnung der maximalen Geschwindigkeit jeder Achse bei Bewegung in positiver Richtung. |
| (2) | Negative Höchstgeschwindigkeit | Eine Aufzeichnung der maximalen Geschwindigkeit jeder Achse, die sich in negativer Richtung bewegt. |
| (3) | Maximale positive Abweichung | Erfasst die maximale Abweichung jeder Achse in positiver Richtung. |
| (4) | Negative maximale Abweichung | Eine Aufzeichnung der maximalen Abweichung jeder Achse in negativer Richtung. |
| (5) | Maximales Drehmoment in Vorwärtsrichtung | Eine Aufzeichnung des maximalen Drehmoments jeder Achse bei Bewegung in positiver Richtung. |
| (6) | Negatives maximales Drehmoment | Eine Aufzeichnung des maximalen Drehmoments jeder Achse bei Bewegung in negativer Richtung. |
| (7) | Zurücksetzen | Der zuvor aufgezeichnete Maximalwert wird gelöscht. |
Wellenform
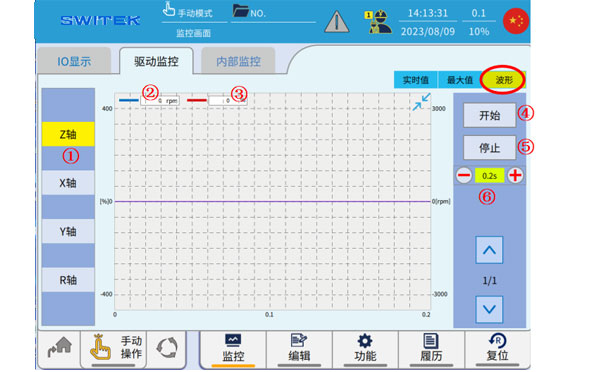
| NEIN. | Name | Funktion |
|---|---|---|
| (1) | Achsenauswahl | Klicken Sie, um die anzuzeigende Achse auszuwählen. |
| (2) | Drehmoment (%) | Die blaue Kurvenform zeigt die Drehmomentänderung. Das Momentandrehmoment des Servomotors kann bis zu 300 % des Nenndrehmoments erreichen. |
| (3) | Drehzahl (U/min) | Die rote Wellenformkurve zeigt die Geschwindigkeitsänderung. |
| (4) | Start | Nachdem Sie die (1)-Achse ausgewählt haben, klicken Sie auf „Start“, um die Wellenformabtastung zu starten. |
| (5) | Stoppen | Stoppen Sie die Wellenformabtastung. |
| (6) | Die Wellenform zeigt die Skala an. | Klicken Sie auf „+“ und „-“, um in die angezeigte Wellenform hinein- bzw. herauszuzoomen. |
3.5.3 Interner Monitor
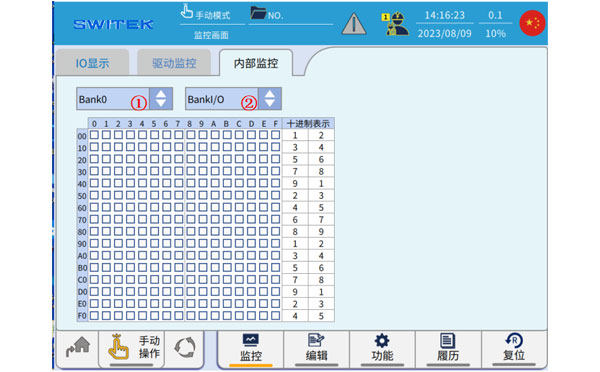
Die „interne Überwachung“ bezieht sich auf die Überwachung des EIN/AUS-Zustands der internen Flagge des Controllers, der in 5 leere *2 Einheiten unterteilt ist, insgesamt 10 Bereiche, wobei das Umschalten zwischen Bank und Einheit durch (1) und (2) erfolgt.







