Hochleistungs-IML-Roboter mit Seiteneinstieg
Schlüsselwörter:IML-Roboter; Betrieb eines IML-Roboters; In-Mold-Labeling-Robotik
SWITEK IML Roboter-Bedienungsanleitung -- 3.7.2 Mechanische Parameter
Abstrakt
Die Einstellung der mechanischen Parameter des IML-Roboters umfasst die Auswahl des Moduls der Funktionseinheit, die mechanischen Parameter der Achse, des Servomotors usw., um einen sicheren und effizienten Betrieb des IML-Roboters zu gewährleisten.
Modellauswahl

| NEIN. | Name | Funktion |
|---|---|---|
| (1) | Modellauswahl | Klicken Sie hier, um den entsprechenden Modusnamen auszuwählen. |
| (2) | Speichern | Nachdem Sie (1) das Modell ausgewählt haben, klicken Sie auf „Speichern“, um den Vorgang zu bestätigen. |
| (3) | Die Informationen zum ausgewählten Modell werden angezeigt | Dieser Informationsabschnitt wird für die Modelle angezeigt, um Ihnen die Unterscheidung zu erleichtern. (Dieser Teil der Modellinformationen muss während der Produktion gepflegt werden, um die Genauigkeit zu gewährleisten.) |
Bitte beachten Sie, dass die oben beschriebene Operation (Modellauswahl und Speichern) nach Abschluss der Modellierung nicht sofort wirksam wird. Die mechanischen und Servoparameter müssen initialisiert und gespeichert werden. Anschließend muss das System neu gestartet werden, damit die Änderungen wirksam werden.
Mechanische Parameter

| NEIN. | Name | Funktion |
|---|---|---|
| (1) | Initialisieren | Durch Anklicken werden die Anfangsdaten der mechanischen Parameter in der Modelldatei ausgelesen und an der Anzeige bei (4) wiedergegeben. |
| (2) | Speichern | Vorhandene Änderungen speichern |
| (3) | Seite | Die Parameter können durch Scrollen nach oben und unten verschoben werden. |
| (4) | Inhalt der mechanischen Parameter |
|
Bitte beachten Sie, dass die Änderung der oben genannten Parameter nicht sofort wirksam wird, sondern gespeichert werden muss und erst nach dem Neustart des Systems wirksam wird.
Antriebsparameter

| NEIN. | Name | Funktion |
|---|---|---|
| (1) | Initialisieren | Durch Anklicken werden die Anfangsdaten der Antriebsparameter aus der Modelldatei gelesen und an der Anzeige bei (4) wiedergegeben. |
| (2) | Speichern | Vorhandene Änderungen speichern. |
| (3) | Seite | Die Parameter können durch Scrollen nach oben und unten verschoben werden. |
| (4) | Inhalt der Laufwerksparameter | Jeder Treiberparameter wird bearbeitet und angezeigt. |
Anleitung zum Einstellen einiger Antriebsparameter:
| NEIN. | Name | Wirkung | Anfangswert | Reichweite | Einheit | Der Hauptpunkt der Kulisse | |
|---|---|---|---|---|---|---|---|
| PA1-02 | INC/ABS-Systemauswahl | Neustart | 0 | 0~1 | „0“ ist ein Inkrementalmotor, „1“ ist ein Absolutmotor. | ||
| PA1-04 | Drehrichtung | Neustart | 0 | 0~1 | Justieren Sie, wenn sich der Motor in die falsche Richtung dreht. | ||
| PA1-13 | Abstimmungsmodus | Echtzeit | 0 | 0~2 | 0 steht für automatisch, 1 für halbautomatisch, 2 für manuell. Der Roboter ist bei Auslieferung auf Stufe 1 eingestellt. | ||
| PA1-14 | Last-Drehmoment-Verhältnis | Echtzeit | 23.0 | 0.0~300 | Mal | ||
| PA1-15 | Abstimmungsverstärkung | Echtzeit | 7 | 1~40 | |||
| PA1-27 | Drehmomentgrenzwert | Echtzeit | 300 | 0~500 | |||
| PA1-28 | Negativer Drehmomentgrenzwert | Echtzeit | 300 | 0~500 | |||
| PA1-52 | S acc/dcc-Einstellung | Echtzeit | 0.0 | 0.0~1000.0 | |||
| PA1-54 | Eine feste Anzahl von Positionsbefehlsantworten | Echtzeit | 30.0 | 0.00~250.00 | |||
| PA1-55 | Position Ring Gain 1 | Echtzeit | 17 | 1~2000 | |||
| PA1-56 | Geschwindigkeitsringverstärkung 1 | Echtzeit | 5 | 1~2000 | |||
| PA1-58 | Rückkopplungsverstärkung 1 | Echtzeit | 0.000 | 0.000~1.500 | |||
| PA1-59 | Drehmomentfilterung | Neustart | 0.00 | 0.00~20.00 | |||
| PA1-70 | Notch-Filter-Modus | Echtzeit | 1 | 0~1 | Bei 0 ist die automatische Erkennung 1 für den eingestellten Wert gültig. | ||
| PA1-71 | Kerbe 1 Frequenznummer | Echtzeit | 134 | 10~4000 | |||
| PA1-72 | Dämpfung der Kerbe 1 | Echtzeit | 1 | 0~40 | |||
| PA1-73 | Kerbe 1 Breite | Echtzeit | 2 | 0~3 | |||
| PA1-74 | Kerbe 2 Frequenznummer | Echtzeit | 53 | 10~4000 | |||
| PA1-75 | Dämpfung der zweiten Stufe | Echtzeit | 1 | 0~40 | |||
| PA1-76 | Kerbe 2 Breite | Echtzeit | 2 | 0~3 | |||
| PA1-78 | Die Frequenzzahl 0 der Brems-Antiresonanz | Echtzeit | 7.0 | 1~300.0 | Hz | Die Vibrationsdämpfung ist beim Anhalten wirksam, daher ist es notwendig, die tatsächliche Vibration vor dem Einstellen zu messen. | |
| PA1-79 | Bremsschwingungs-Trägheitsverhältnis | Echtzeit | 0 | 0~80 | Wenn der Wert auf 0 gesetzt ist, ist PA1-78 ungültig; wenn der Wert auf 1 gesetzt ist, ist PA1-78 gültig. | ||
| PA1-80 | Die Frequenz Nummer 1 der Brems-Antiresonanz | Echtzeit | 8.0 | 1~300.0 | Hz | Die Vibrationsdämpfung ist beim Anhalten wirksam, daher ist es notwendig, die tatsächliche Vibration vor dem Einstellen zu messen. | |
| PA1-81 | Bremsschwingungs-Trägheitsverhältnis | Echtzeit | 0 | 0~80 | Wenn der Wert auf 0 gesetzt ist, ist PA1-80 ungültig; wenn der Wert auf 1 gesetzt ist, ist PA1-80 gültig. | ||
| PA1-94 | Drehmomentfiltermodus | Neustart | 0 | 0~1 | Auf 0 einstellen und keine Drehmomentfilterung verwenden | ||
| PA2-64 | Bremswirkungszeit | Echtzeit | 0 | 0.00~99.9 | Sec | ||
| PA2-65 | Auswahl der retrograden Resistenz | Neustart | 1 | 0~1 | Stellen Sie den Wert auf 1, wenn der Rückgewinnungswiderstand angeschlossen ist, und auf 0, wenn er nicht angeschlossen ist. | ||
| PA2-69 | Abweichung vom Messwert | Echtzeit | 15.0 | 0.1~100.1 | Rev | ||
| PA3-79 | Einstellung des Impedanzwerts für die Rückwärtsrichtung | Echtzeit | 30.0 | 3.9~160.0 | Ω | Der Wert des Rückgewinnungswiderstands wird festgelegt | |
| PA3-80 | Respawn-Impedanzleistungseinstellung | Echtzeit | 40 | 1~5000 | W | Rückwirkende Einstellung der Widerstandskapazität | |
Einfacher Einrichtungs- und Abstimmungsmodus

| NEIN. | Name | Funktion |
|---|---|---|
| (1) | Achsenauswahl | Klicken Sie, um die Achse auszuwählen, an der Sie arbeiten möchten. |
| (2) | Auto-Tune | Wenn die Maschine vor Verlassen des Werks eingestellt wird, können die Antriebsparameter in diesem Modus abgeleitet werden. |
| Halbautomatische Abstimmung | Halbautomatischer Abstimmungsmodus, einige Parameter sind festgelegt, andere werden feinabgestimmt. | |
| Manuelle Abstimmung | Alle Antriebsparameter sind festgelegt. | |
| (3) | Wert festlegen | Das aktuell verwendete, abgestimmte Verhältnis von Verstärkung zu Trägheitsmoment zu Drehmoment. |
| (4) | Berechneter Wert | Der aus der aktuellen Berechnung abgeleitete Wert. |
| (5) |  | Wenden Sie den berechneten Wert auf den Sollwert an. |
| (6) |  | Wenden Sie den Inhalt des Feldes „Festwert“ auf das Feld „Berechneter Wert“ an. |
| (7) | Speichern | Die aktuellen Treiberparameter ändern und speichern. |
Im Automatikmodus können Sie über diese Schnittstelle den Abstimmungsmodus jeder Achse umschalten, das Trägheitsmoment-Verhältnis und die Abstimmungsverstärkung ändern, um die Wirkung der eingestellten Werte in Echtzeit zu beobachten und sinnvollere Parametereinstellungen zu finden.
- Auto-tune mode
Im Auto-Tuning-Modus wird das Trägheitsmomentverhältnis des Parameters PA1-14 in Echtzeit gemessen.
Die Hauptfunktion des automatischen Abstimmungsmodus besteht darin, den Wert automatisch entsprechend dem Laufverhalten anzupassen, wenn die geeigneten Fahrparameter in der Anfangsphase der Fehlersuche noch nicht bekannt sind, bis ein gutes und stabiles Laufverhalten erreicht ist und sich das Trägheitsmoment-Drehmoment-Verhältnis einem konstanten Wert annähert.
- Halbautomatischer Abstimmungsmodus
Sobald der Lauf stabil ist, schalten Sie in den halbautomatischen Einstellmodus, stellen Sie die Parameter manuell ein, speichern Sie diese, schalten Sie das Gerät aus und starten Sie es neu, bevor die Parameter wirksam werden. Im halbautomatischen Einstellmodus werden die Hauptparameter, wie z. B. das Trägheitsmomentverhältnis, fixiert, während einige Servoparameter in Echtzeit angepasst werden, um einen reibungslosen Betrieb zu gewährleisten.
- Manueller Abstimmungsmodus
Im Modus „Manuelle Abstimmung“ sind alle Servoparameter fest eingestellt. Dieser Modus erfordert eine hohe Präzision bei der Parametereinstellung.
Einfache Einrichtung – Kerbfilter-Einstellung

| NEIN. | Name | Funktion |
|---|---|---|
| (1) | Achsenauswahl | Klicken Sie, um die Achse auszuwählen, an der Sie arbeiten möchten. |
| (2) | Adaptive Filterung | Adaptive Filterfunktion EIN/AUS-Schaltung. |
| (3) | Parameter der Notch-Filterung | Verschiedene Parameter im Zusammenhang mit der Notch-Filterfunktion. |
Wenn beim Einschalten des Servos oder während des Betriebs ein lautes Geräusch auftritt, kann der adaptive Filter aktiviert werden. Dieser begrenzt automatisch alle durch mechanische Resonanz verursachten Störgeräusche und kann zwei Resonanzpunkte eliminieren. Bei einer Resonanzfrequenz von 4000 Hz tritt kein Resonanzpunkt auf.
Einfache Einrichtung – Vibrationssteuerungseinstellung
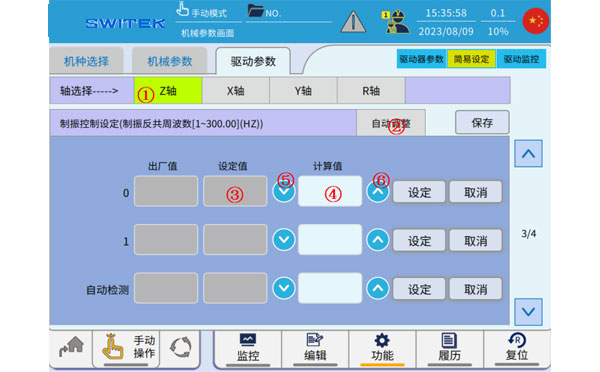
| NEIN. | Name | Funktion |
|---|---|---|
| (1) | Achsenauswahl | Wählen Sie die Achse aus, die Sie bedienen möchten. |
| (2) | Automatische Anpassung | Die relevanten Parameter der eingestellten Schwingungsdämpfung werden automatisch erfasst. |
| (3) | Wert festlegen | Aktuell verwendete Schwingungsdämpfungsparameter. |
| (4) | Berechneter Wert | Berechnen Sie den abgeleiteten numerischen Wert. |
| (5) | | Wenden Sie den berechneten Wert auf den Sollwert an. |
| (6) | | Wenden Sie den Inhalt des Feldes „Festwert“ auf das Feld „Berechneter Wert“ an. |
Einstellung der Vibrationsdämpfung: Sie ist wirksam zur Unterdrückung von Vibrationen beim Anhalten. Der übliche Einstellwert liegt zwischen 5 und 10. Der Einstellwert lässt sich anhand des Drehmomentverlaufs grob berechnen, ist aber beim ersten Mal nicht immer korrekt einzustellen.
Einfache Einrichtung – Kollisionserkennung

| NEIN. | Name | Funktion |
|---|---|---|
| (1) | Achsenauswahl | Die auszuwählende Achse |
| (2) | Maximale Drehmomentvariation |







