
sales06@switek.biz

+86 186 5927 5869

Shopping

Subscrib to Us
sales06@switek.biz
+86 186 5927 5869
Shopping
Subscrib to Us
Keywords:IML Robot; IML Robot Operating; In Mold Labeling Robotics
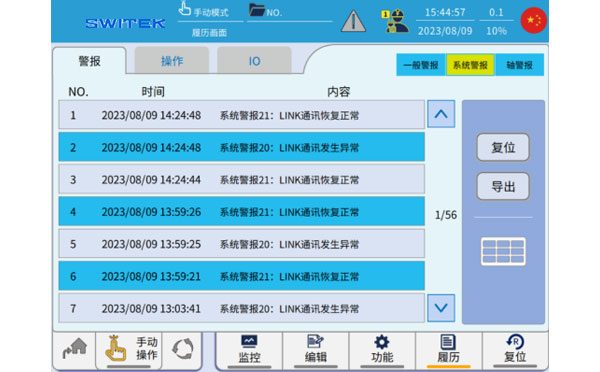
The "Alert History" is a recording of the alarms occured in the running of the IML robot for reference of the fast diagnose of the system broken down. And it's also a reference of the IML robot maintenance to keep it working in a healthy and stable condition.

| No. | Name | Function |
|---|---|---|
| (1) | Alarm Information | Click to view the details of the alarm message. |
| (2) | Page | Click to scroll up and down to view the alarm record. |
| (3) | Presentation mode switching | Cllick to toggle how the alert is displayed. |
| (4) | Reset | Tap Reset Alert |
| (5) | Export | Click to export the alert history. |
In addition to general alarm history on this page, you can also switch between the history of system alarms and axis alarms, and the operation and display are similar.

SW255C
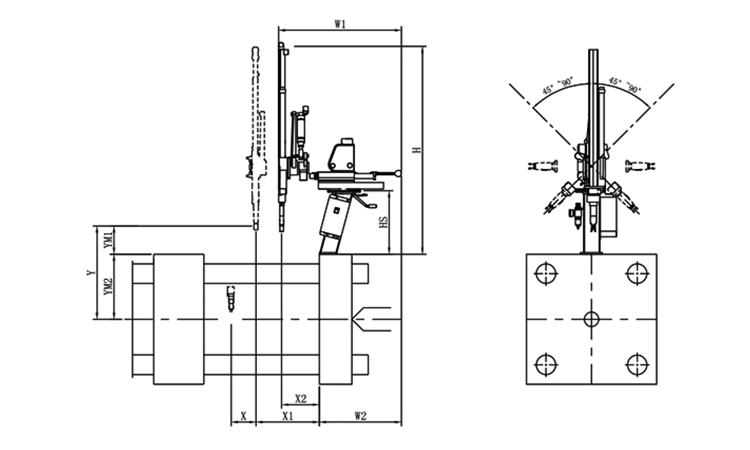
Unit: mm
| X1 | X2 | X3 | X4 | Y | YM1 | YM2 | Z | L | W | H | Payload | 300 | 100 | 0 | 0 | 550 | 155 | 395 | -45°~+45° | 650 | 650 | 1260 | 2kg |
|---|
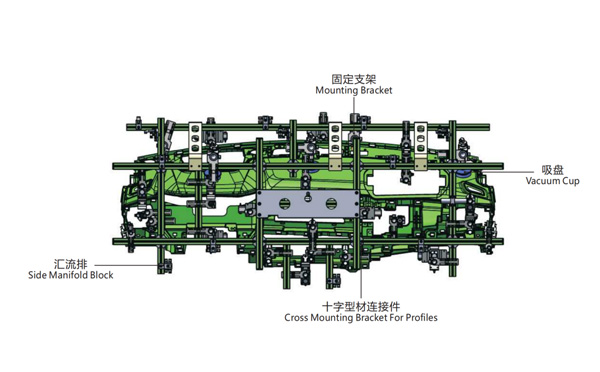
EOAT Assembly Demonstration -- One Cavity Instrument Panel Picking EOAT
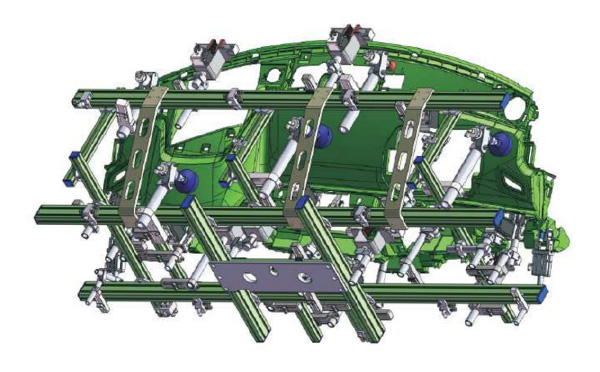
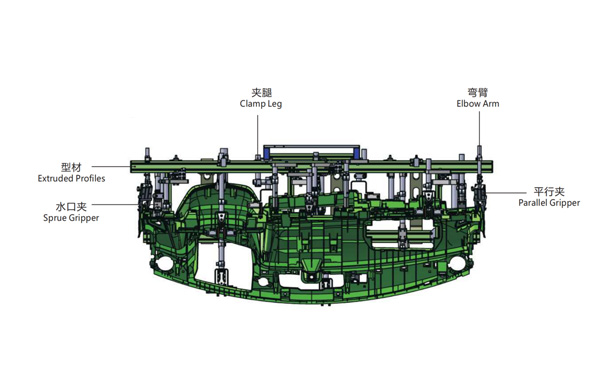
Product Descriptions
If I want to buy a 3 axis servo injection robot for my Haitian MA12OOIII/400, which one would be the best choice?


