
sales06@switek.biz

+86 186 5927 5869

Shopping

Subscrib to Us
sales06@switek.biz
+86 186 5927 5869
Shopping
Subscrib to Us
Keywords:IML Robot; IML Robot Operating; In Mold Labeling Robotics
The "ABS Setting" is liable only for the "Absolute Encoder Motor" but we use only "Incremental Servo Motor" in SWITEK IML Robot. So the operator of SWITEK IML Robot can ignore this page and do nothing to the setting.

| No. | Name | Function |
|---|---|---|
| (1) | Reset | Click "Reset" to clear the current position display of the axis and restore it to the state before returning to the original point. |
| (2) | Set | Click "Set" to set the current position of the axis to zero. |
When an absoute servo is applied, the determination of the initial origin can be set directly on this page without the sensor and Z signal.
Please not that if you change the position of the origin point by mistake, the pervious point may be automatically operated, which may lead to a collision.

SW6308-20
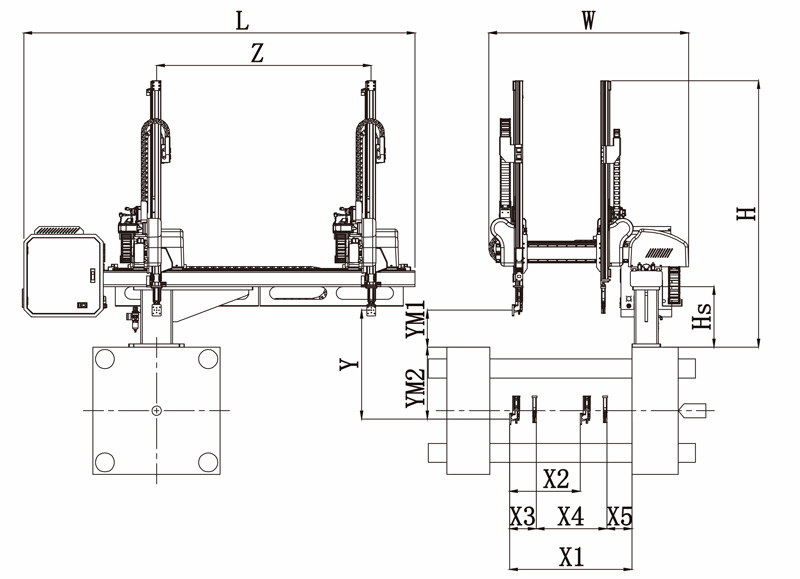
Unit: mm
| X1 | X2 | X3 | X4 | Y | YM1 | YM2 | Z | L | W | H | Payload | 980 | 640 | 165 | 645 | 800 | 235 | 565 | 1280 | 2320 | 1500 | 1690 | 3kg |
|---|
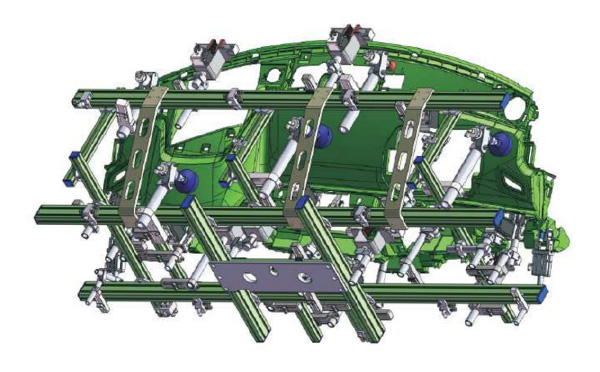
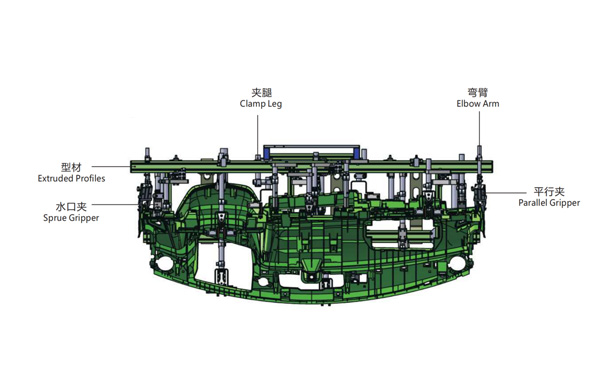
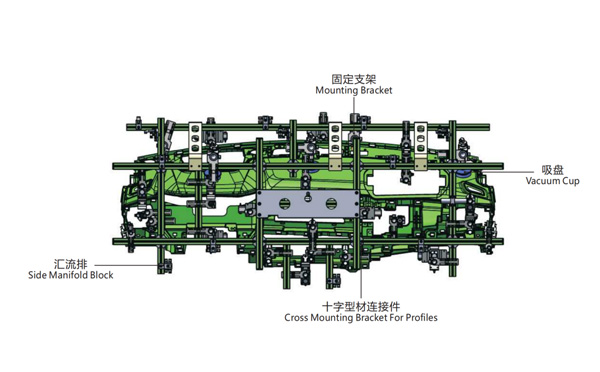
EOAT Assembly Demonstration -- One Cavity Instrument Panel Picking EOAT
Product Descriptions
What Would be a SWITEK Turn-key 8 Cavities silicone Cartridge Tubes Side Entry IML Solutions Include?
With the advancement of the IML technology, more and more silicone cartridge producers choose to have an IML silicone cartridge tubes as the subsitution of the traditional off print silicone cartridge tubes. With an IML solutions, the silicone cartridge tubes producer will be able to produce an IML silicone cartridge tubes immediately after the injection process.
Generally for one set of silicone cartridge tubes there are 3 parts, the body of the silicone tube,the caps for the repeat use of the silicone sealant and the bottom block which you can push the sealant out. So for a standard turn-key IML solutions of an 8 cavities silicone cartridge tubes SWITEK will provide:
For the injection molding machine the silicone cartridge producer can choose to buy from the local distributors or have SWITEK to buy it as part of the turn-key IML solutions.
For more information about a turn-key IML solution for Silicone cartridge tube please feel free to contact Adams from SWITEK Automation for a professional proposal of a ready to work IML system for IML Silicone cartridge production.



