
sales06@switek.biz

+86 186 5927 5869

Shopping

Subscrib to Us
sales06@switek.biz
+86 186 5927 5869
Shopping
Subscrib to Us
Keywords:Panasonic A6 Servo Installation Instruction, Panasonic A6 Driver, Panasonic A6 Series Servo Motor Manual
This driver (A to F-frame) is equipped with a dynamic brake for emergency stop. Pay a special attention to the followings.
Do not start/stop the motor by turning on/off the Servo-ON signal (SRV-ON). Otherwise it may damage the dynamic brake circuit of the driver.
The motor becomes a dynamo when driven externally and short circuit current occurred while dynamic brake is activated may cause smoking or fire.
•P.3-33 "Inputs and outputs on connector X4" • P.4-6 to 4-85... "Details of Parameter" • P.6-4 "Protective Function"
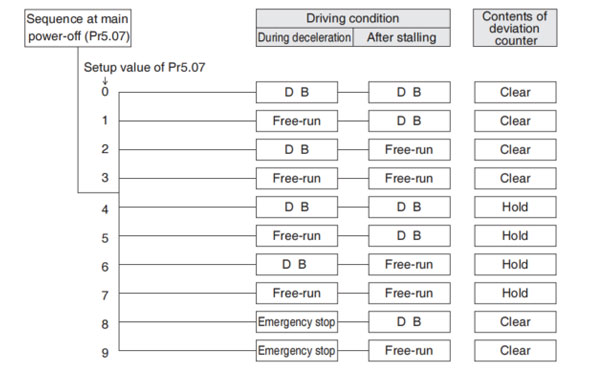
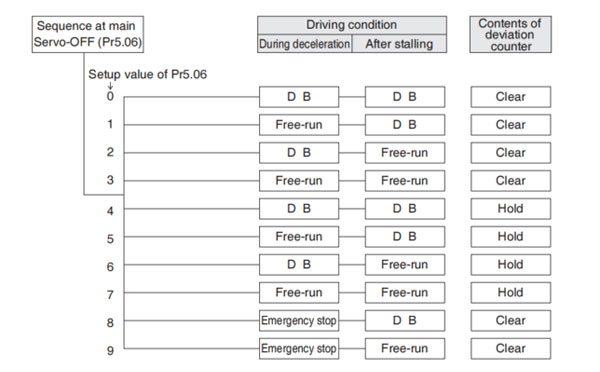
Torque limit value at emergency stop will be that of Pr5.11 (Setup of torque at emergency stop) when the setup value is 8 or 9.
Torque limit value at emergency stop will be that of Pr5.11 (Setup of torque at emergency stop) when the setup value is 8 or 9.
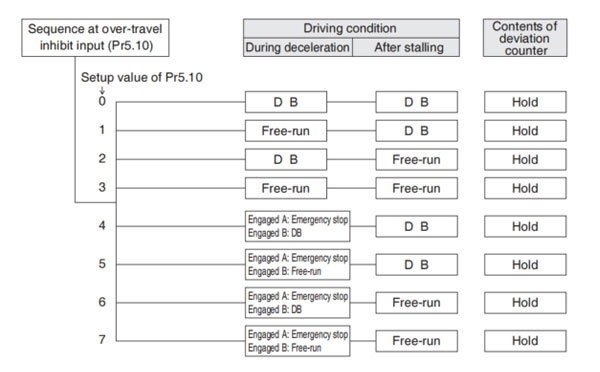
When setup value is within the range 4 and 7, the protection function that supports immediate stop acts according to operation A and the function that does not support acts according to operation B.
During decelaration to stop, the main power supply must be maintained.
When the protection function acts, content of deviation counter is cleared as the alarm is cleared.
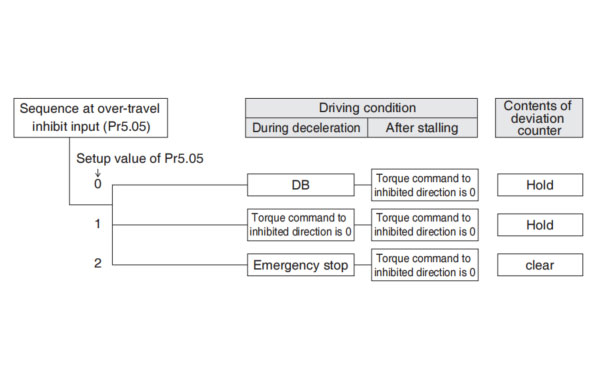
Torque limit value during deceleration will be that of Pr.5.11 (Setup of torque at emergency stop) when the setup value is 2.
Changes will be validated after the control power is turned on.

SW6710
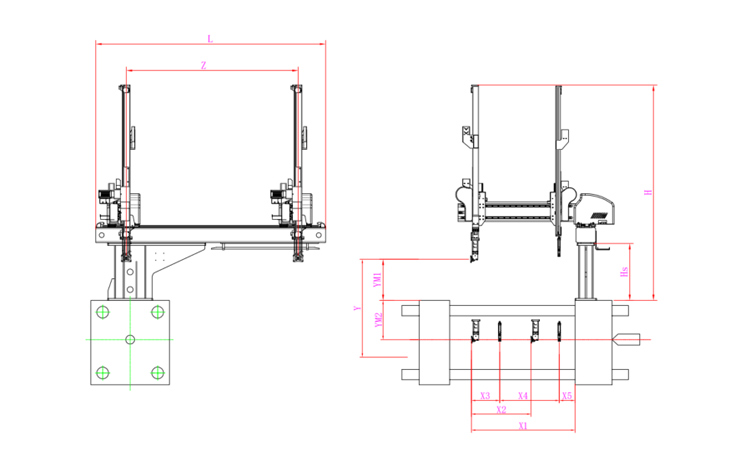
Unit: mm
| X1 | X2 | X3 | X4 | Y | YM1 | YM2 | Z | L | W | H | Payload | 1055 | 607 | 288 | 607 | 1000 | 420 | 580 | 1750 | 2340 | 1700 | 2190 | 8kg |
|---|
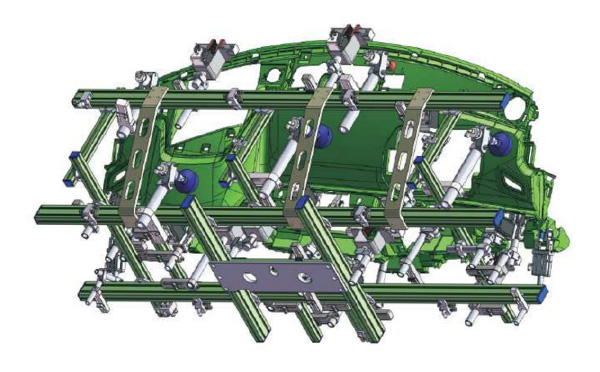
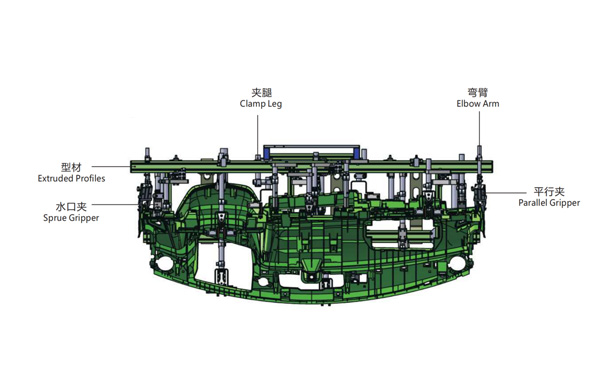
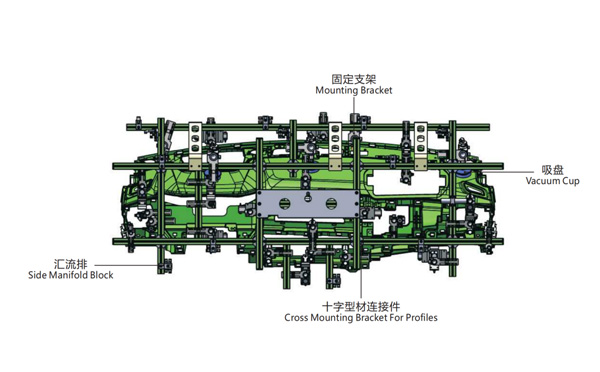
EOAT Assembly Demonstration -- One Cavity Instrument Panel Picking EOAT
Product Descriptions
Is there any Low Budget Solutions for PVC Pipe Fittings Runner Cutting?
PVC pipe fittings are one of the most commonly used connector in the drainage project and a cold runner designed mold is the most economic solutions for the production of the PVC pipe fittings, but the removal of the runner in result is a labour intensive work. Is there any economic way to remove the runners from the PVC pipe fittings automatically?
For the producer of PVC pipe fittings the most economic soluton to remove the runner is with an Air Nipper fixed to the picking robot immediately after the PVC pipe fittings picked out from the mould. The robot will drop the seperated pipe fittings and runner to different containers. Below configuration of SWITEK runner cutting solution for 16 cavities PVC pipe fittings for your reference:
The Air Nipper runner cutting system is an easy to start solution for the producers of PVC pipe fittings, which the Air Nipper would be controlled by the picking robot and is the best solution for the small size PVC pipe fittings (with a diameter around φ25mm). Anyway it also must be custom made according to the mold design.
For more solutions about the pipe fittings runner cuttings and other automation solutions please contact Adams from SWITEK, for a profound proposal of turn-key solutions of pipe fittings production.



