
sales06@switek.biz

+86 186 5927 5869

Shopping

Subscrib to Us
sales06@switek.biz
+86 186 5927 5869
Shopping
Subscrib to Us
Keywords:PETRI DISH PACKING SYSTEM, PETRI DISH INJECTION MOLDING SOLUTIONS
The "Debugging Page" is the interface for the operator of the SWITEK side entry petri dish packing system to test the function of each functional units of the system manually in system start up or a fast trouble shooting during the maintenance of the system to keep it working stably.
Debugging Page
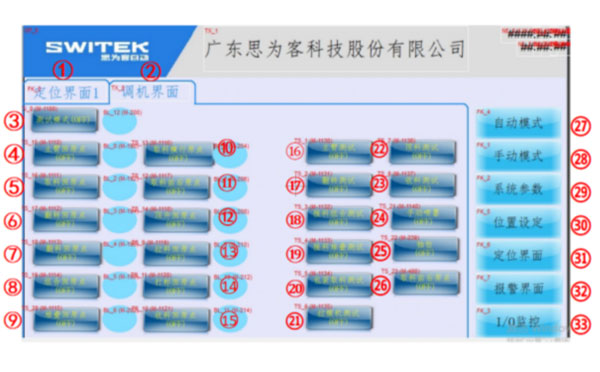
| No. | Description |
|---|---|
| 1 | Position Interface 1 (Pos Interface 1) 570 |
| 2 | Setup Page 661 |
| 3 | Test Mode (OFF) 702 |
| 4 | Main Arm Back to Original Point (Arm Home [OFF]) 662 |
| 5 | Petri Dish Picking Axis Back to Original Point (Pickup Home [OFF]) 663 |
| 6 | Petri Dish Flipping Axis Back to Original Point (Flip Home [OFF]) 664 |
| 7 | Petri Dish Clipping EOAT Back to Original Point (Material Flip Home [OFF]) 665 |
| 8 | Petri Dish Combine Unit Back to Original Point (Combo Home [OFF]) 666 |
| 9 | Stacking Unit Back to Original Point (Stack HOme [OFF]) 667 |
| 10 | Stacked Petri Dish Horizional Picking Arm Back to Original Point (Picker Cross Home [OFF]) 679 |
| 11 | Petri Dish Picking Arm Forward/Backword Original Point (Picker F/B Home [OFF]) 680 |
| 12 | Stacked Petri Dish Lifting Axis Back to Original Point (Lifter Home [OFF]) 681 |
| 13 | Sleeve Pulling Cylinder Back to Original Point (Feeder Home [OFF]) 682 |
| 14 | Mark Printer Back to Original Point (Labeling Home [OFF]) 683 |
| 15 | Packed Petri Dish Collecting Servo Back to Original Point (Collect Mat Ori [OFF]) 753 |
| 16 | Main Arm Testing (Arm Test [OFF]) 668 |
| 17 | Petri Dish Flipping Testing (Flip Test [OFF]) 669 |
| 18 | Petri Dish Picking and Assembling Testing (Jig Combo Test [OFF]) 670 |
| 19 | Petri Dish Picking and Stacking Test (Jig Stack Test [OFF]) 671 |
| 20 | Sleeve Pulling Testing (Packaging Test [OFF]) 672 |
| 21 | Sleeve Pulling Unit Functional Testing (Pull Mold Test [OFF]) 673 |
| 22 | Stacked Petri Dish Lifting Testing (Top Material [OFF]) 674 |
| 23 | Packed Petri Dish Collecting Test (Receiving [OFF]) 675 |
| 24 | Manual Ink Jerking (Manual Ink [OFF]) 676 |
| 25 | Sampling (OFF) 677 |
| 26 | Sleeve Change (Lable [OFF]) 712 |
| 27 | Auto Mode (Auto) |
| 28 | Manual Mode (Manual) |
| 29 | System Parameters (Sys Params) |
| 30 | Position Setting (Pos Set) |
| 31 | Position Interface (Pos Inerface) |
| 32 | Alarm Interface |
| 33 | I/O Monitor (I/O Mon) |

SW7112DS
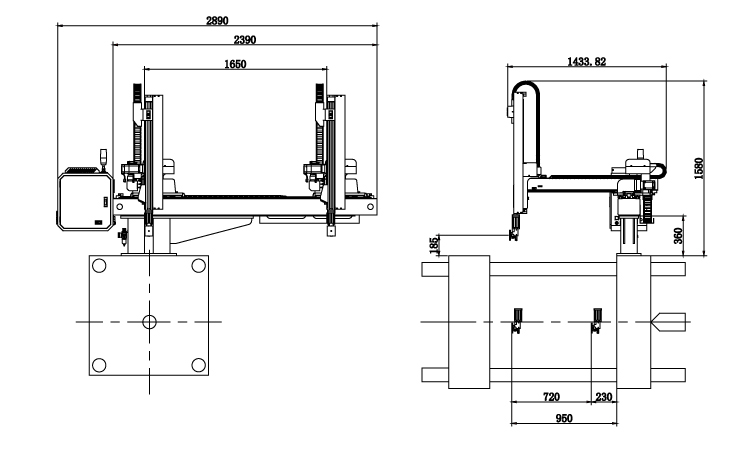
Unit: mm
| X1 | X2 | X3 | X4 | Y | YM1 | YM2 | Z | L | W | H | Payload | 950 | 720 | 0 | 0 | 1200 | 425 | 775 | 1650 | 2710 | 1434 | 1780 | 5kg |
|---|
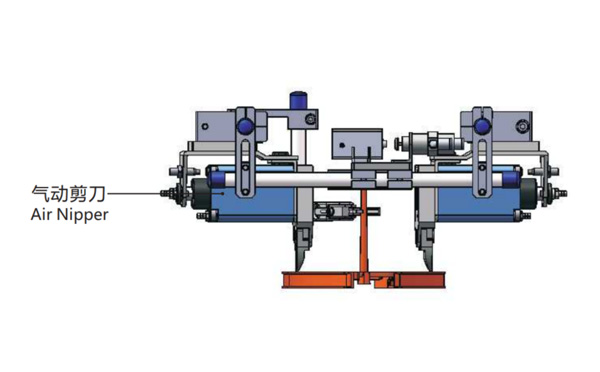
EOAT Assembly Demonstration -- Two Cavities Parts Picking EOAT with Runner Cutting by Air Nipper
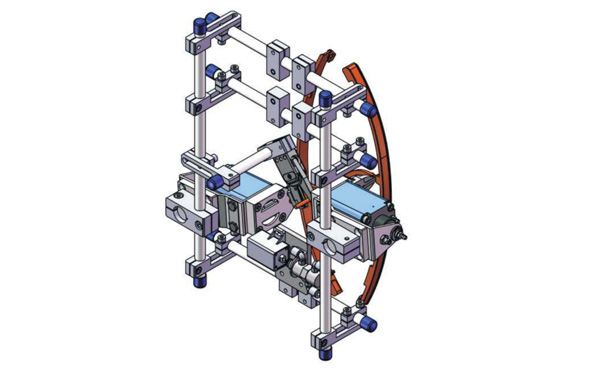
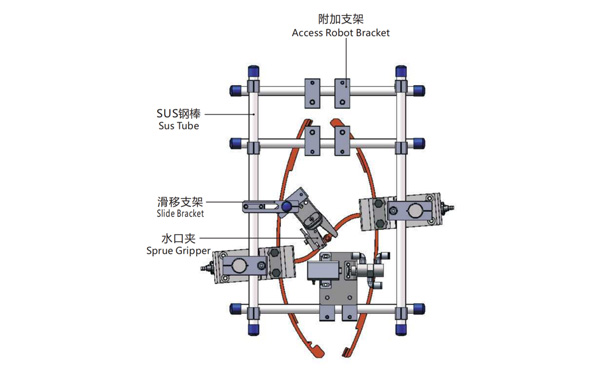
Product Descriptions
Bom List
| Product Name | PN # | Model | Quantity |
|---|---|---|---|
| Sus Tube | 4.Y00021 | PST12-1500 | 2 |
| Air Nipper | 1.Y00004 | GT-NY25 | 2 |
| Straight Blades for Plastic | 1.Y00037 | NY25AJ | 2 |
| Fixing Block | 7.Y00633 | SCE2-25 | 2 |
| Tube Plugs | 1.Y03638 | PST12-1500 | 11 |
| Cross Connector | 7.Y00027 | SMBT-2012 | 2 |
| Access Robot Bracket | 7.Y00002 | SMBH1-12M6 | 6 |
| L-Type Thread Hose Fitting | 1.Y02809 | APL6-M5 | 3 |
| Slide Bracket | 7.Y00004 | SCF4-1240W16 | 7 |
| Slide Bracket | 7.Y00001 | SMBS-12T16 | 7 |
| Sprue Gripper | 8.Y00091 | GR12-12-CN | 1 |
| Cross Connector | 7.Y00020 | SMBT-1212 | 1 |
For A 20L IML Bucket Project, Which of the JUPITER Series Injection Molding Machine is the Best Choice?
For A 20L IML Bucket Project, Which of the JUPITER Series Injection Molding Machine is the Best Choice?
20L IML bucket is now a very popular solution as the package of the branded paints with it's easy production and dynamic image design. To choose an injection molding machine among the JUPITER series machinery, the most important parameter to consider is the opening stroke of the injection molding machine of which to ensure that the robotic arm will have sufficient moving space in mold to put in the label and pick the parts.
To start a project of 20L IML paint pail, first of all we must have the 3D dimensional measurement of the bucket especially the height of it. For most of the 20L IML pail the height would be around 350mm, to ensure that the IML robot will have sufficient space in the mold to put the lalbel and pick the IML buckets out, the minimum opening stroke of the injection molding machine would be around 850mm, so the best of JUPITER two platen injection molding for your 20L paint pails would be JU7500 which the mold opening stroke is 1400/900mm.
For more information of an IML projection planning please feel free to contact Adams from SWITEK to get a ready to work turn-key solutions of IML container production.



