sales06@switek.biz

+86 186 5927 5869

Shopping

Subscrib to Us
sales06@switek.biz
+86 186 5927 5869
Shopping
Subscrib to Us
The BU2500 is an intelligent two-platen energy-saving servo injection molding machine produced by BORCHE Machinery with a clamping force of 250,000kN. As an "INTELLIGENT" injection molding machine, the BURCHE BU2500 enables the intelligent interconnection of the injection molding machien, the peripherals and robotic arm under a closed loop control with consistent data mapping, ensuring production wastage is minimalised and ultimately production costs reduced. With a daylight up to 3600mm, the BU2500 is suitable for the production of a dustbin with a height up to 1500mm.
The Dimension of BORCHE BU2500 Two-platen Injection Molding Machine
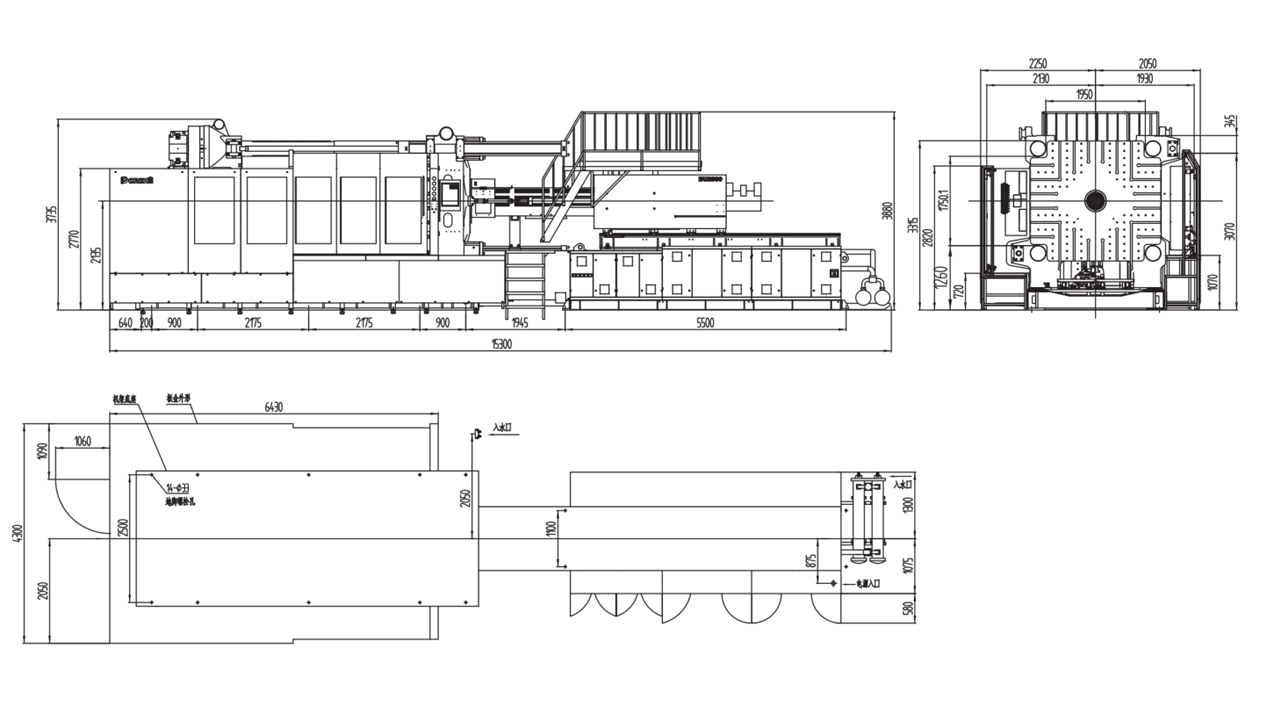
Unit: mm
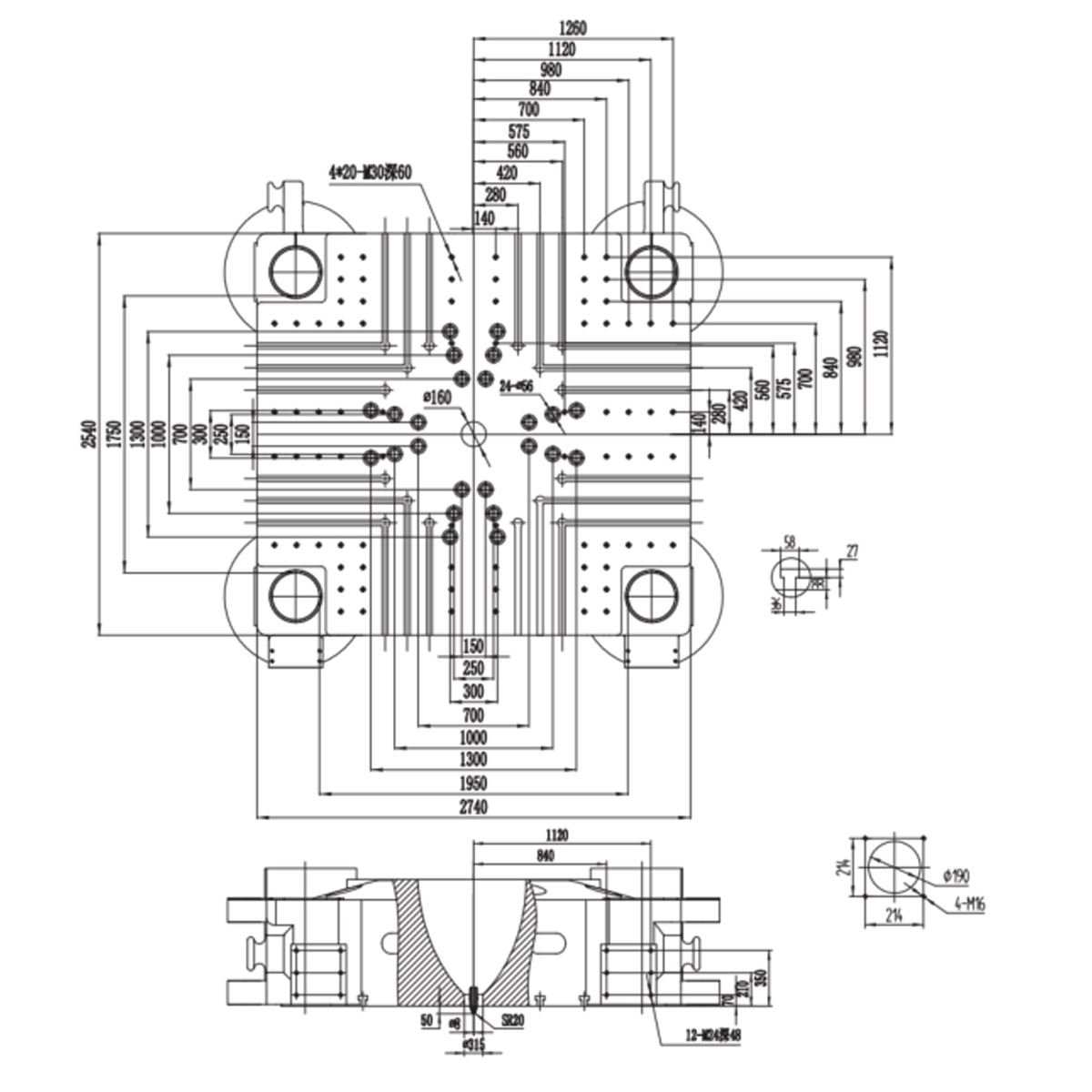
The Dimension of the Mold Platen
The picking robotic arm in the BORCHE BU2500 two-platen injection molding machine dustbin production project is SWITEK heavy duty 3 axis servo injection robot SW7730DS, of which is designed for the injection molding machine 1000~4000T with a payload up to 75kg. The vertical stroke of the robotic arm can be up to 3000mm to ensure the picking capacity of the robot from the injection molding machine.
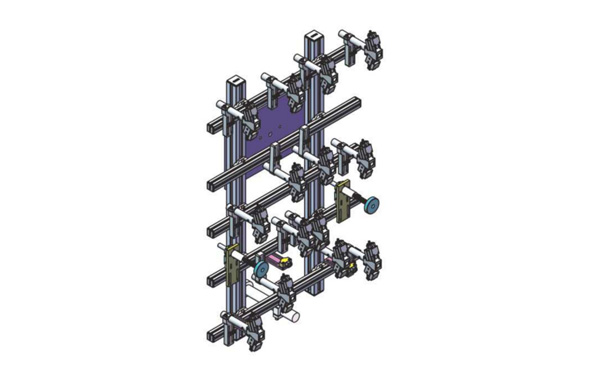
The picking EOAT in this project is to have six suction cups to pick the dustbin from the top of it and retreat until the dustbin removed out of the mold core completely. The structure of the EOAT design is not complex but ensure the loading capacity of the EOAT for a deep cavity dustbin of which will have a a march larger torch while moving.
In planning an injection molding system for the deep cavity products like a dustbin, we'll not noly take care of the universal parameters of an injection molding machine such as the injection volume, the space between the tie-bars etc., but also the opening stroke of the injection molding machine to ensure that the parts could be picked out by the robotic arm with a properly designed picking EOAT.

SW6310D-20
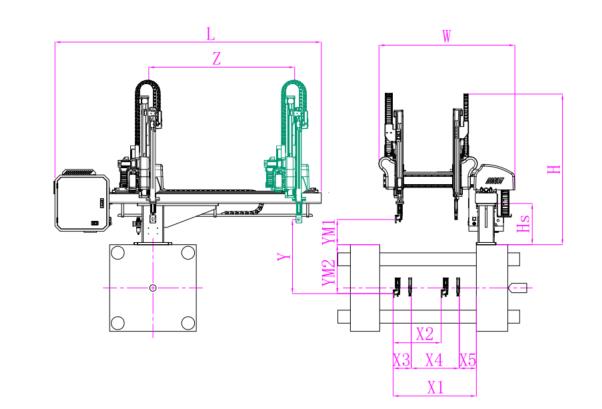
Unit: mm
| X1 | X2 | X3 | X4 | Y | YM1 | YM2 | Z | L | W | H | Payload | 740 | 640 | 140 | 415 | 1000 | 235 | 765 | 1650 | 2640 | 1500 | 1580 | 3kg |
|---|
EOAT Assembly Demonstration -- Two Cavities Non-woven Fabric In Mold Insertion
Product Descriptions
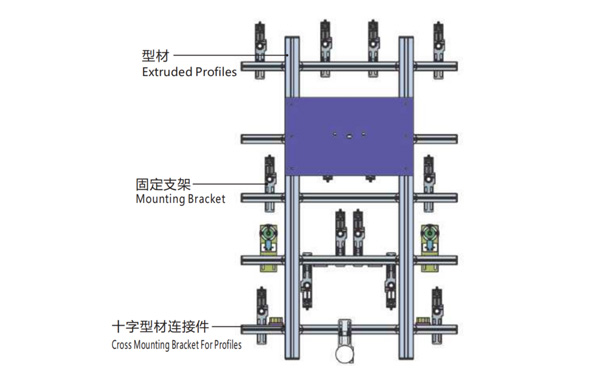
Bom List
| Product Name | PN # | Model | Quantity |
|---|---|---|---|
| Extruded Profiles | 4.Y00052 | PEP4040-1000 | 2 |
| Plugs for Profile | 4.Y00072 | PEP4040 | 4 |
| Extruded Profiles | 4.Y000481 | PEP2525-1500 | 2 |
| Extruded Profiles | 4.Y00481 | PEP2525-1000 | 1 |
| Plugs for Profile | 4.Y00070 | PEP2525 | 10 |
| Cross Mounting Bracket for Profiles | 7.Y00356-T | SMBA-2540T | 10 |
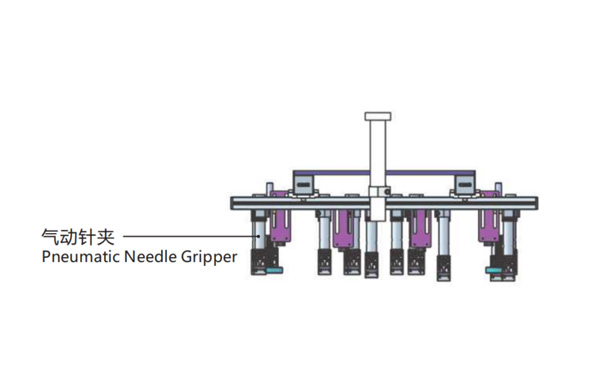
| Pneumatic Needle Gripper | 8.Y00025 | GN2010 | 14 |
| Mounting Bracket | 7.Y00308-T | SMBE2-2060T | 14 |
| Mounting Bracket | 7.Y00309-T | SMBE2-3060T | 1 |
Why So Many Cutlery Producers Will Choose a Submarine Gate Cold Runner Mold for Their Cutlery Auto-packing Solutions?
Plastic (PP + CA/PLA) cutlery of different size are widely used around the world with a booming demand of "Takeout" food in a fast-paced life nowadays. And as an easy to produce products more and more plastic factory owners joint this business. But for the new producers of cutlery, how to make your investment rewardable?
To producce a plastic cutlery (Knife, Forks and Spoon) the producer will need an injeciton molding machine, the mold and the automation system. For the automation system it could be a robot only for manually packing or robot + auto-packing system for a cutlery auto-packing system. For the mold the cutlery can either choose a hot runner mold or a cold runner mold. But more and more producer will choose a submarine gate cold runner mold, why?
The most important is the cost advantage of a submarine gate cold runner mold against a hot runner one. As a low value added products most of the cutlery producing system are low budget project, and reduction of the investment means an increase of the profit in the future.
For more ideas about a cutlery auto-packing solution please contact Adams from SWITEK to get a turn-key solution of cutlery packing.