sales06@switek.biz

+86 186 5927 5869
sales06@switek.biz
+86 186 5927 5869

| Description | Unit | Value |
|---|---|---|
| INJECTION UNIT | ||
| Shot volume | cm3 | 848 |
| Shot weight | g | 772 |
| Shot speed | mm/s | 175 |
| Screw diameter | mm | 60 |
| Injection pressure | MPa | 178 |
| Screw L:D ratio | -- | 21 |
| CLAMPING UNIT | ||
| Clamping force | kN | 2600 |
| Opening Stroke | mm | 600 |
| Space between tie bars | mm x mm | 580 x 580 |
| Mold thickness(min) | mm | 195 |
| Mold thickness(max) | mm | 610 |
| Hydraulic ejection stroke | mm | 195 |
| Hydraulic ejection force | kN | 111 |
| POWER UNIT | ||
| Pump motor | kW | 172 |
| Heating capacity | kW | 18.9 |
| GENERAL | ||
| Oil tank capacity | L | 480 |
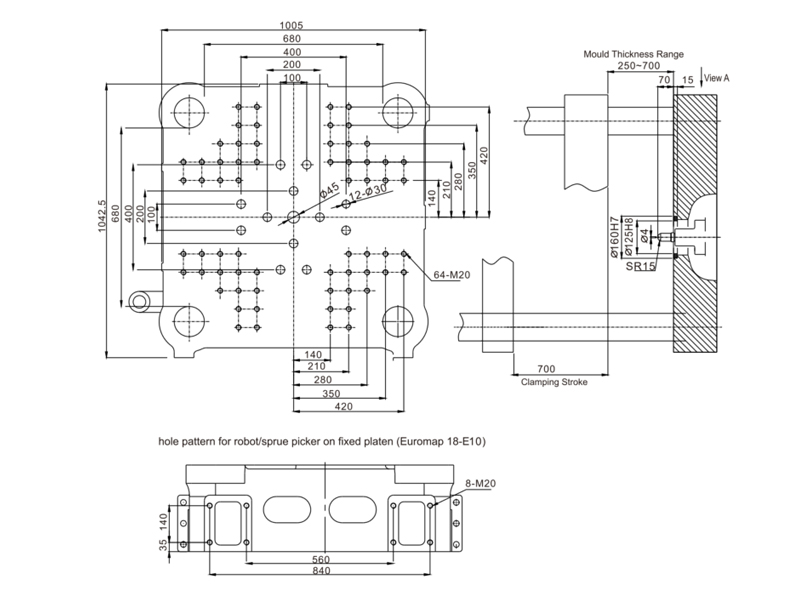
Platen Dimension
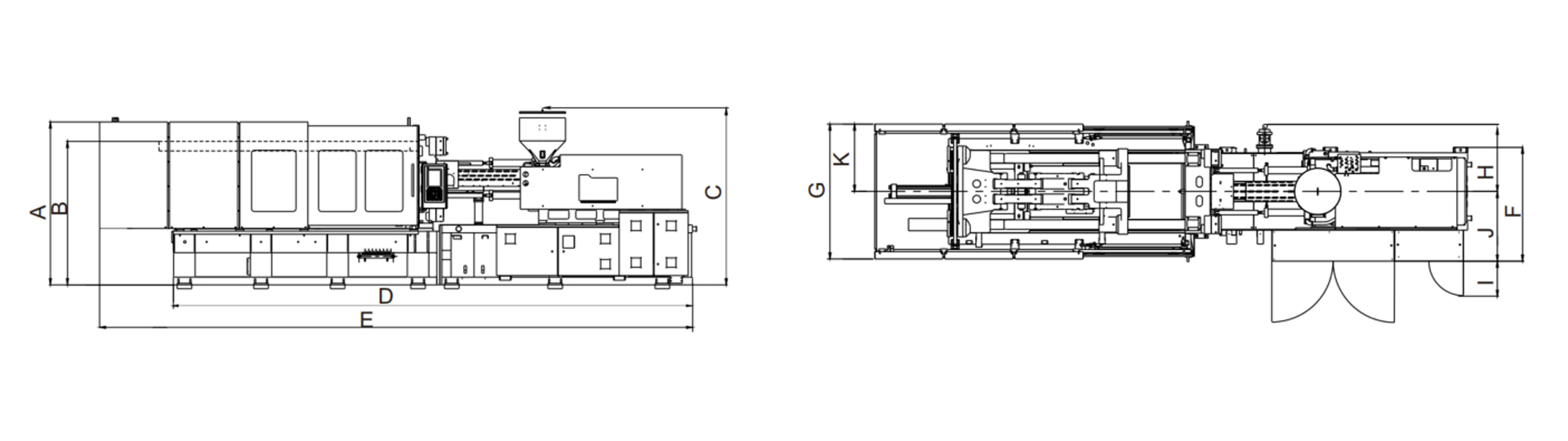
Machine Dimmension
| # | Value |
|---|---|
| A | 1961 mm |
| B | 1757 mm |
| C | 2185 mm |
| D | 5030 mm |
| E | 6072 mm |
| F | 1417 mm |
| G | 1462 mm |
| H | 810 mm |
| I | 800 mm |
| J | 852 mm |
| K | 731 mm |
HaiTian, will bring a seriers of new injction machinery and injection technology for visitors of Chinaplas 2023 from around the world at booth #12G31 which include:
As the World Largest injection molding machine manufacturer, Haitian has expaned the calmping force of the Zhafir all electric injection molding machine to 13800KN for a samarter injection automation solution in the future.
Turn-key IML Solutions
Turn-key Pipe Fittings Injection Automation Solutions
Turn-key Cutlery Packing Automation Solutions
High Performance Injection Robot
Injection Machinery News & Express


E-mail: sales@switek.biz
Injection Machinery
CopyRight © HuangYanZheng